








Product Details
Airbot's new V6 brushless AIO flight controller for FPV may be small but is packed with features. With Support ending for F1 processors, F3 becomes the bottom wrung, but don't worry, this little board features an F4 MCU.
Its Betaflight OSD is connected over SPI in DMA, don't know what that means? It is designed on the current proposed architecture for betaflight, it will show you any and all data you want on your FPV feed and you can change settings including tuning your PIDs without taking your goggles off!
The board also features an MPU6000 gyro connected over SPI for fast, accurate, low noise gyro data and can support 2-6s direct input. That's right, up to 6s on this 20x20 FC! And lastly, it features a built-in LC filter and voltage sensor, making it a beast!
Notice:
If you plan to use the FC with the Airbot 4in1 ESC(Wave or Ori 4in1), you only need one 8pin Cable (The optional 8pin 4in1 Cable)
New on the V6
- Tantalum Capacitors added for noiseless gyro reading
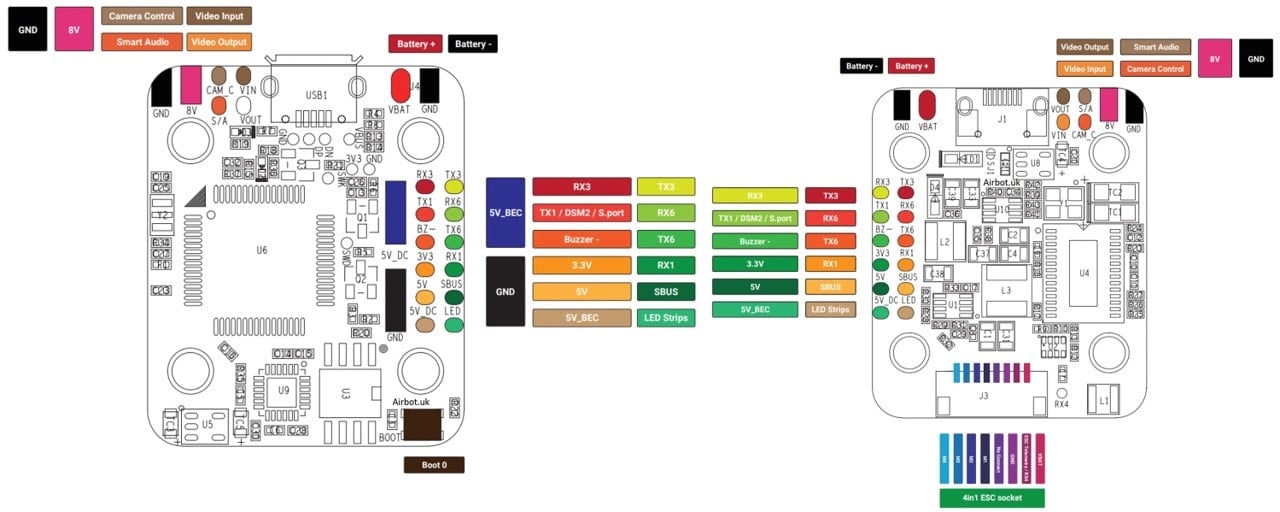
- Solder pads added for SmartAudio and camera control(next to video pads)
- Added an 8v BEC and LC filter for the camera and VTX power
- This board now has 5 UART ports
- New style layout
- Uses OMNIBUSF4FW Target. After flashing the firmware go to CLI and type set gyro_to_use = second, and save to get the IMU working.
Features
- 2-6s direct input (adaptor to connect to Wave 4in1 ESC providing power and ESC signal connection (note Wave is 2-4s))
- MPU6000 gyro connected by SPI for low noise, clean, high frequency gyro samples
- BMP280 Barometer to enable altitude hold
- Betaflight OSD
- Onboard voltage sensor
- Onboard 5v regulator, components rated to 2A - recommended 1A max to prevent heat build up)
- Built-in L-C filter to provide clean power to FPV kit
- STM32 F405 MCU running betaflight 3.2
- Pin headers for SBUS/PPM input
- Output for 4 motors on JST-SH 1.0 8pin plug connects to Airbot Wave 4in1 ESC (The Option 8pin 4in1 Cable)
- 25x25mm (20x20mm M3 mount holes)
Includes
- 1x Flight Controller

