
Produktdetails
Dies ist die Pixhawk 4 Platine, die in Partnerschaft mit Unmanned Tech hergestellt wird. Durch die direkte Herstellung dieser Platine können wir die Preise senken und gleichzeitig höchste Qualität gewährleisten sowie Unterstützung anbieten, falls etwas schief geht. Für diese Platine gilt unsere 180-Tage-Garantie gegen Herstellungsfehler.
Die Pixhawk 4 verfügt über die derzeit fortschrittlichste Prozessortechnologie von ST Microelectronics®, Sensortechnologie von Bosch®, InvenSense® und ein NuttX Echtzeit-Betriebssystem, die eine unglaubliche Leistung, Flexibilität und Zuverlässigkeit für die Steuerung jedes autonomen Fahrzeugs bieten.
Der Mikrocontroller auf der Pixhawk 4 verfügt jetzt über einen 2 MB Flash-Speicher und 512 KB RAM. Mit den erhöhten Leistungs- und RAM-Ressourcen können Entwickler bei ihrer Entwicklungsarbeit produktiver und effizienter sein. Komplexere Algorithmen und Modelle können auf diesem Autopiloten implementiert werden.
Leistungsstarke, rauscharme IMUs an Bord sind für Stabilisierungsanwendungen konzipiert. Daten-Ready-Signale von allen Sensoren werden zu separaten Interrupt- und Timer-Capture-Pins des Autopiloten geleitet, was eine präzise Zeitstempelung der Sensordaten ermöglicht. Neu entwickelte Vibrationsisolierungen ermöglichen genauere Messungen, wodurch Fahrzeuge eine bessere Gesamtflugleistung erzielen können.
Die beiden externen SPI-Busse und sechs zugehörigen Chip-Select-Leitungen ermöglichen das Hinzufügen weiterer Sensoren und SPI-Schnittstellen-Nutzlasten. Es gibt insgesamt vier I2C-Busse, zwei für den externen Gebrauch und zwei gruppiert mit seriellen Ports für GPS/Kompass-Module.
Das Pixhawk 4 Autopilot-Entwicklungskit ist perfekt für Entwickler in Forschungszentren von Unternehmen, Start-ups und für Akademiker (Forschung, Professoren, Studenten).
Schnittstellen
- 8-16 PWM-Servoausgänge (8 von IO, 8 von FMU)
- 3 dedizierte PWM/Capture-Eingänge am FMU
- Dedizierter R/C-Eingang für CPPM
- Dedizierter R/C-Eingang für Spektrum / DSM und S.Bus mit analogem / PWM RSSI-Eingang
- Dedizierter S.Bus-Servoausgang
- 5 Allzweck-Seriell-Ports, 2 mit Flusskontrolle, 1 mit separatem 1,5A-Strombegrenzer
- 3 I2C-Ports
-
4 SPI-Busse
-
1 interner Hochgeschwindigkeits-SPI-Sensorbus mit 4 Chip-Selects und 6 DRDYs
-
1 interner rauscharmen SPI-Bus, dediziert für Barometer mit 2 Chip-Selects, keine DRDYs
-
1 interner SPI-Bus, dediziert für FRAM
-
Unterstützt dediziertes SPI-Kalibrierungs-EEPROM auf dem Sensormodul
-
1 externer SPI-Bus
- Bis zu 2 CAN-Busse für Dual-CAN mit serieller ESC, jeder CAN-Bus verfügt über individuelle Silent-Steuerungen oder ESC RX-MUX-Steuerung
- Analogeingänge für Spannung/Strom von 2 Batterien
- 2 zusätzliche Analogeingänge
Elektrische Daten, Spannungsbewertungen:
- Netzteilmodul-Ausgang: 4,9~5,5V
- Max. Eingangsspannung: 6V
- Max. Strommessung: 120A
- USB-Stromeingang: 4,75~5,25V
- Servo-Rail-Eingang: 0~36V
Umweltdaten, Qualität & Zuverlässigkeit
- Betriebstemperatur: ~40~85°C
- Lagertemperatur: -40~85°C
- CE
- FCC
- RoHS-konform (bleifrei)
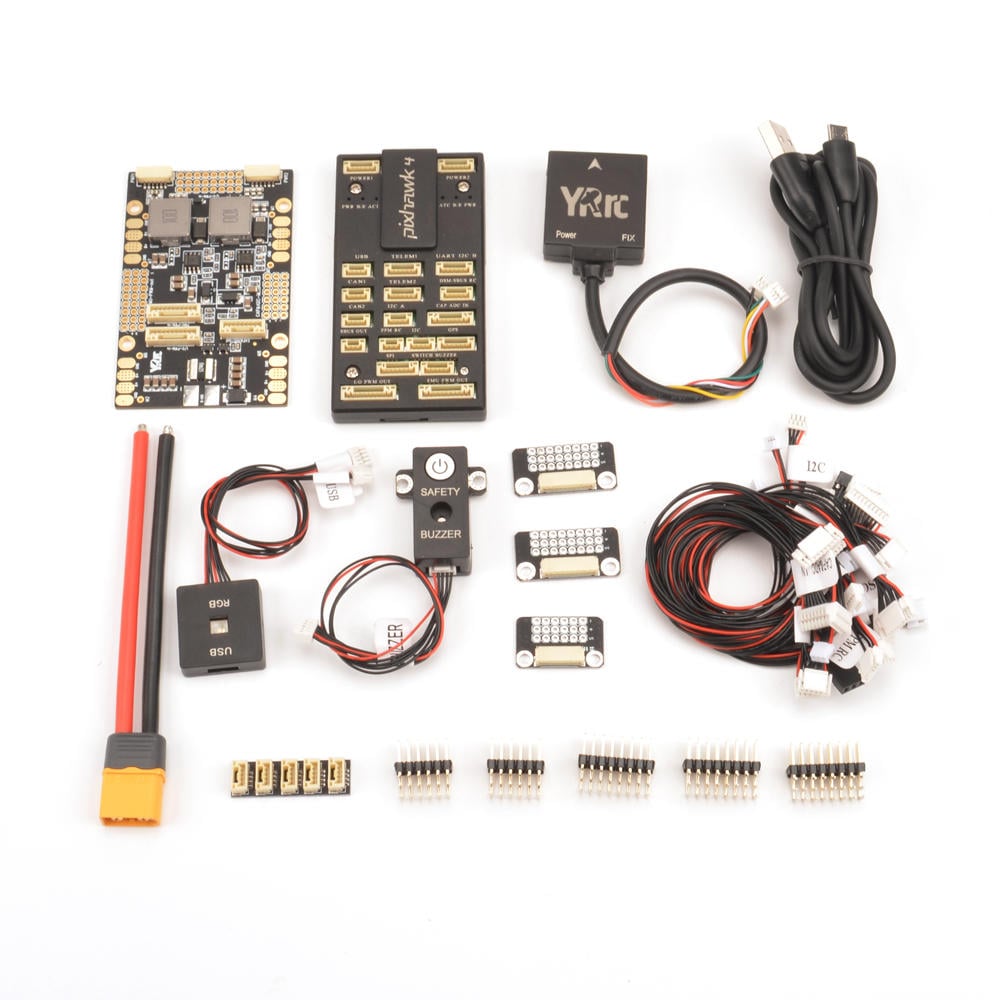
Paket beinhaltet:
- Pixhawk 4 Autopilot
- Ublox M8n GPS/Kompass-Modul
- PM07 Leistungsmodul
- Externes LED/USB-Modul
- Sicherheitsschalter/Buzzer-Modul
- i2c-Hub
- Server Header PCBs
- Kabelpaket
Ressourcen:
Weitere Informationen (wie Pinbelegung und Datenblatt) finden Sie im Pixhawk 4 Handbuch .