














Produktdetails
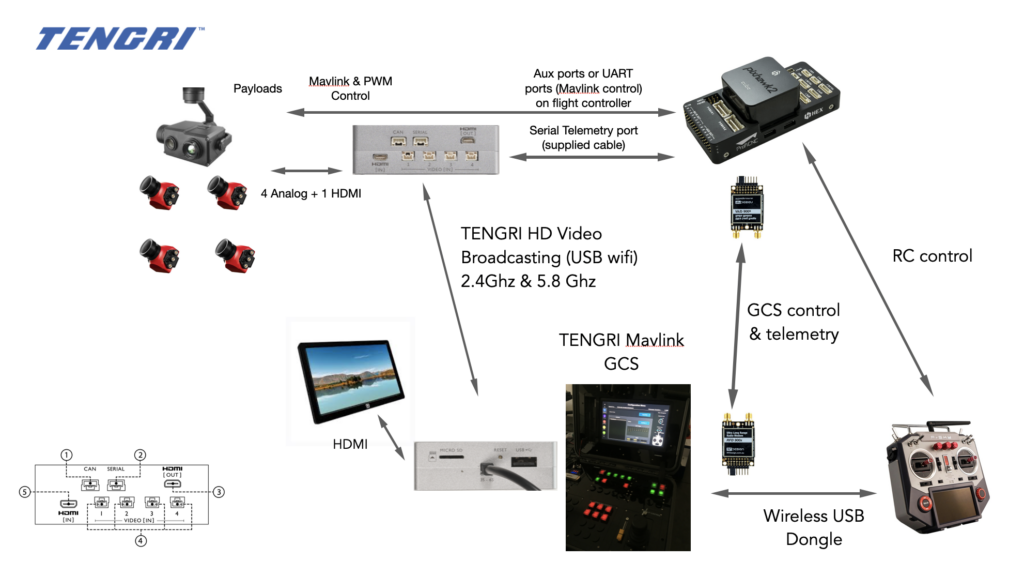
Der TENGRi Unmanned Vehicle HUB Computer (UvHc) bietet Ardupilot- und PX4-basierten UAV-Entwicklern und -Betreibern ein Gerät zur Integration von Flugsteuerungen, Sensoren, Nutzlasten, Navigation, Video, Kommunikation, Cloud- und Steuergeräten in eine einzige, vereinheitlichte Plattform unter Verwendung gängiger Komponenten.
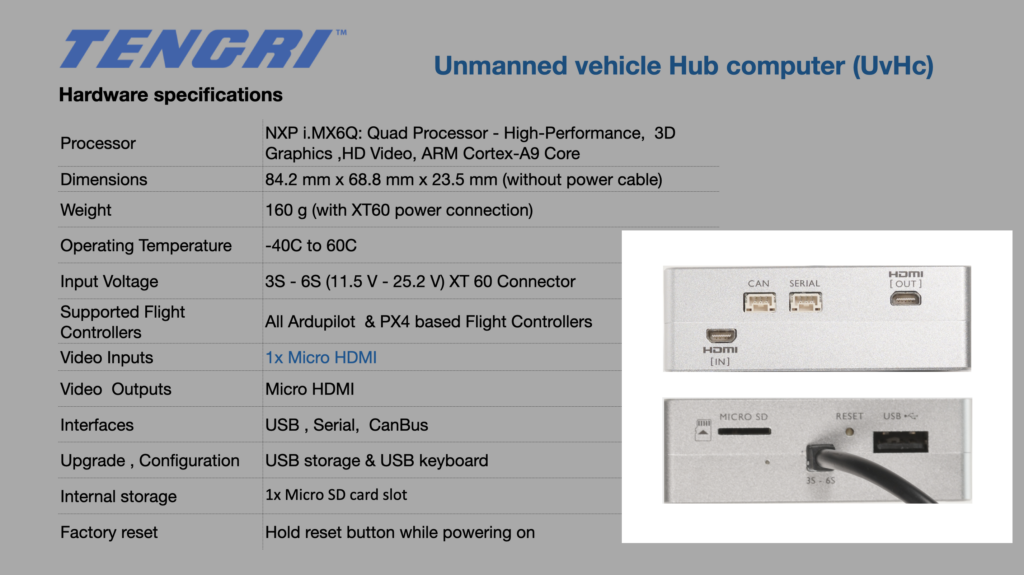
Der UvHc wird von einem NXP iMX6 Quad-Prozessor mit einem hochstabilen und zuverlässigen Linux-Betriebssystem angetrieben, auf dem die TENGRI Fusion-Firmware läuft. Keine Android-Updates oder Abstürze, nur Zuverlässigkeit in Industriequalität.
Integrieren und implementieren Sie erstklassige Luft-, Boden- und Cloud-Komponenten mit der TENGRi Fusion-Firmware, die gängige Hardwarehersteller und Standards unterstützt.
In zwei Versionen erhältlich
- UvHC – Standard-Hub-Computer
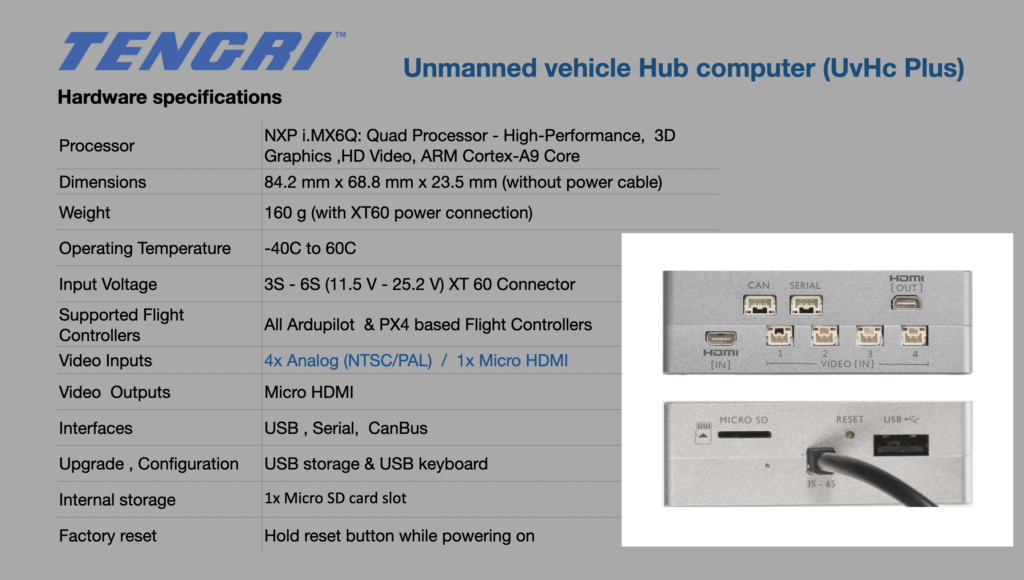
- UvHC Plus, alle Funktionen der Standardversion mit zusätzlichen 4 analogen Videoeingängen.

Wofür wird es verwendet?
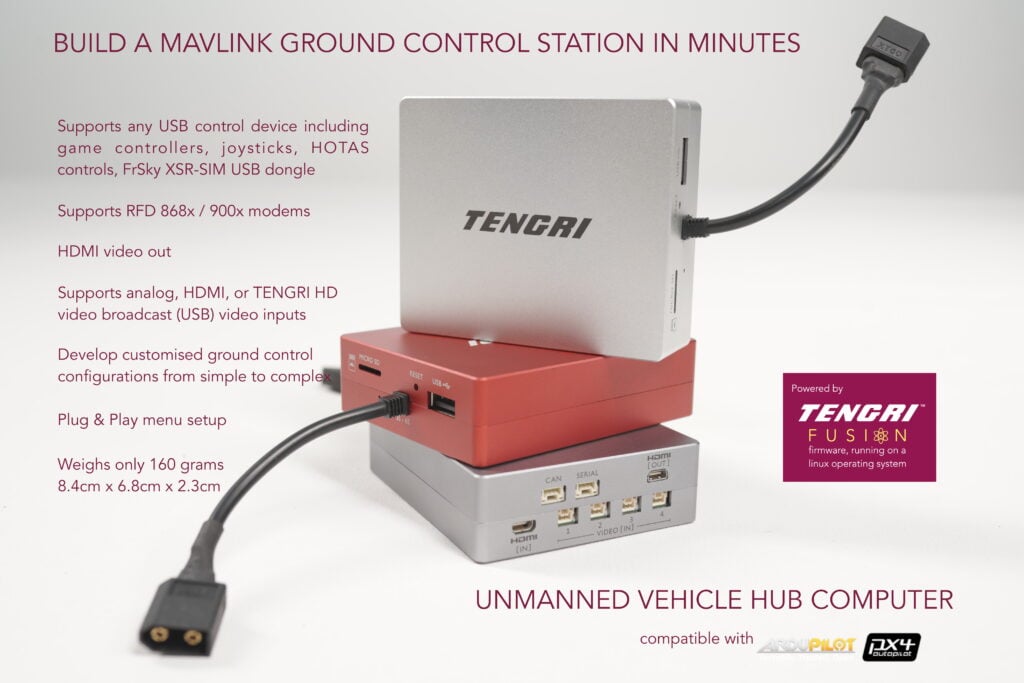
- Erstellen Sie in weniger als einer Stunde eine benutzerdefinierte Mavlink-basierte Bodenstation in beliebiger Form unter Verwendung Ihrer bevorzugten Steuerungen / Displays
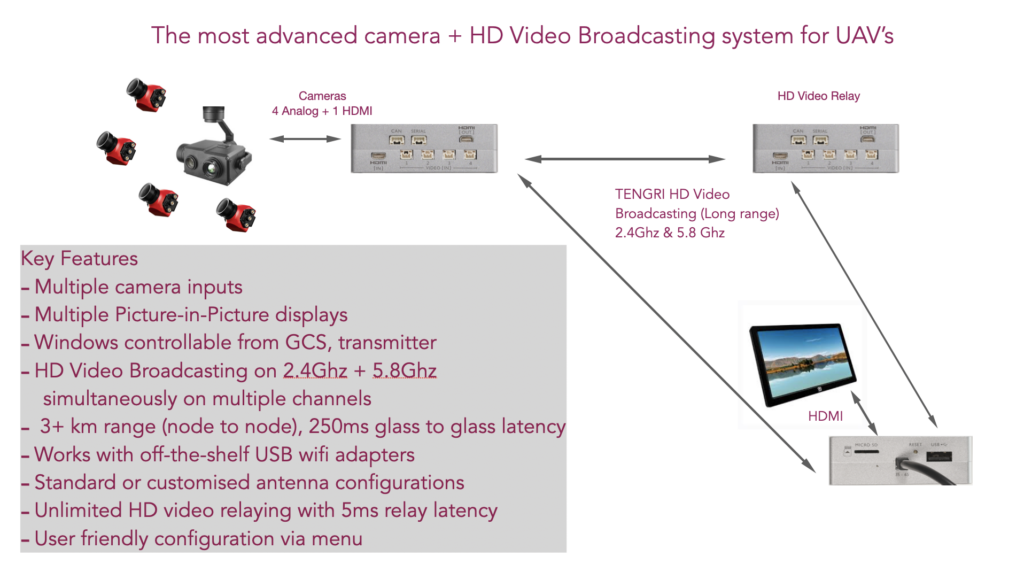
- Schließen Sie mehrere Kameras und/oder Nutzlasten am UAV für integrierte Video-, Telemetrie- und Steuerungsfunktionen an
- Senden Sie HD-Video zwischen zwei Tengri-Einheiten mit handelsüblichen USB-WLAN-Adaptern (Reichweite abhängig von Antennen – bis zu 10 km)
- Setzen Sie mehrere Bodenempfänger ein, um kollaborative Missionsteams zu unterstützen
- Leiten Sie Videos zwischen UAVs und Bodenkontrollempfängern mit einem Video-Relay-UAV oder einer bodengestützten Relay-Station weiter.
- Ermöglichen Sie Single-Operator-Missionen mit mehreren Joysticks/Steuerungen für Nutzlasten am Bodencontroller
- Koordination von Aufgaben der künstlichen Intelligenz/maschinellen Lernens über einen Onboard-Computer (Coral/Jetson) oder in der Cloud über LTE-Verbindung
- Nutzlastintegration an Bord (über 20 Nutzlastintegrationen geplant und weiter steigend)
Weitere Informationen entnehmen Sie bitte der Anwendungsbroschüre – Tengri.Anwendungen


Nutzlastintegrationen mit Tengri Fusion

Erweiterte Videobroadcasting


Hauptmerkmale
- Funktioniert mit allen Ardupilot- und PX4-basierten Flugsteuerungen.
- Schnelle Plug & Play-Installation. Konfiguration über RC-Sendersteuerungen oder USB-Tastatur – kein Laptop oder Mobilgerät erforderlich.
- Integriert sich mit den gängigsten Geräten wie Futaba / Frsky RC-Sendern, RFD-Telemetrie-Funkgeräten, HDMI-Kameras, analogen FPV-Kameras, Connex HD-Videoübertragung, handelsüblichen USB-WLAN-Adaptern/Antennen für DIY-HD-Übertragungen, Gamecontrollern / Joysticks und vielem mehr. Neue Integrationen werden kontinuierlich hinzugefügt.
- Hardware-Konnektivität über USB, Seriell/UART, HDMI, Composite-Analogkamera-Eingang und Canbus. USB-Hub-Konnektivität wird zum Anschließen mehrerer Geräte unterstützt.
- Software-/Firmware-Konnektivität über Mavlink, UAVCAN, TCP/IP, UDP, TENGRi_Broadcast.
- Entwickeln Sie ein integriertes professionelles System, das hochgradig an Ihre spezifischen Anforderungen und UAVs angepasst ist.
- Aufrüstbar und erweiterbar zur Unterstützung neuer Geräte, Protokolle und Standards.
Enthalten
- 1x TENGRI Unmanned Vehicle Hub-Computer
- 5x Analoge Videoverbindungskabel (nur in der Plus-Version enthalten)
- 1x Serielle Verbindung für Flugsteuerungen der Pixhawk 1 Generation
- 1x Serielle Verbindung für Cube-, Holybro-, DROTEK-Flugsteuerungen
- 1x Serielle Verbindung für CUAV-Flugsteuerungen
- 1x Canbus-Anschluss

