














Produktdetails
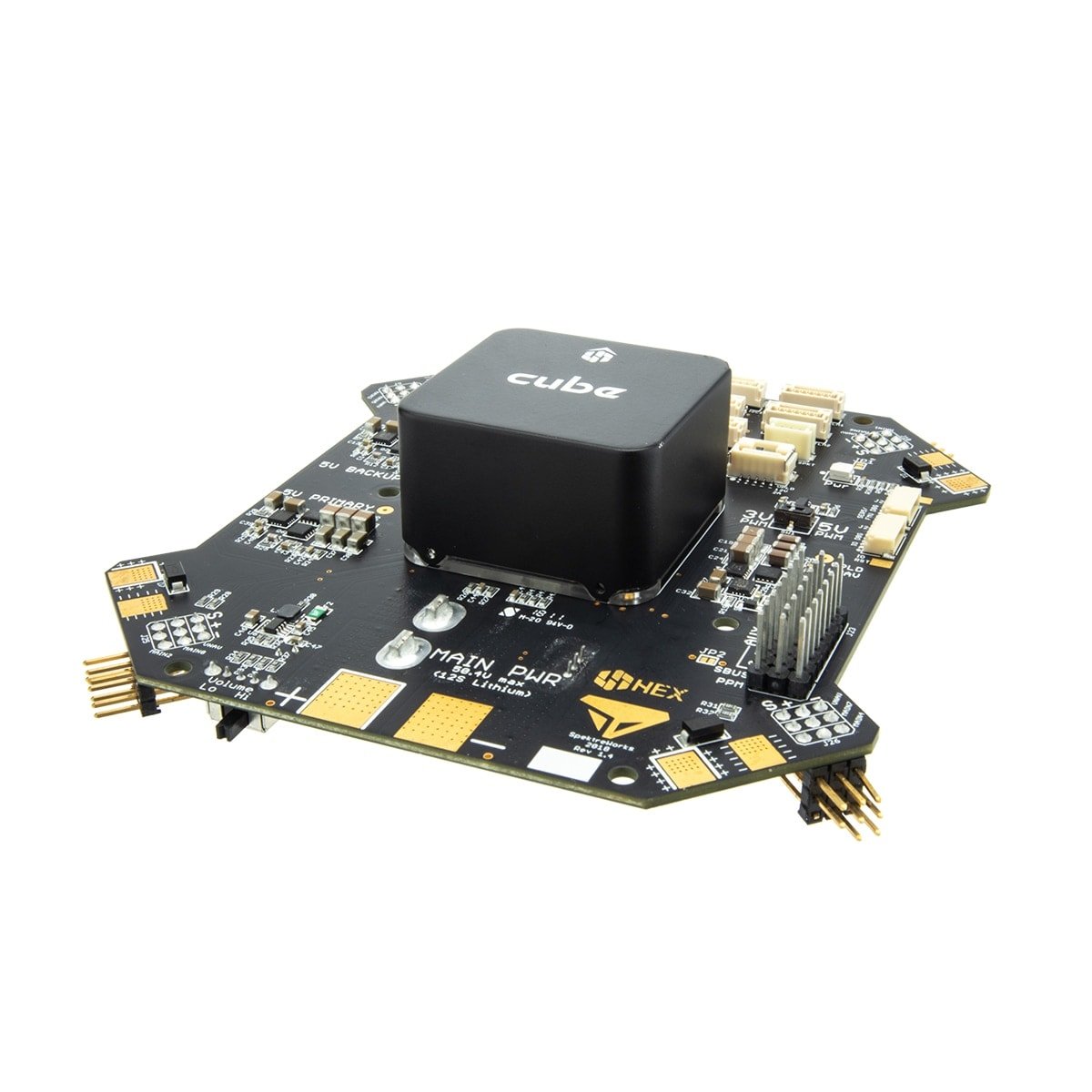
Der Hauptzweck der Cube Kore Multi-Rotor Carrier Board für den Pixhawk Cube ist es, das Kabel- und Modul-Wirrwarr zu reduzieren, das typischerweise mit einer Multi-Rotor-Baugruppe verbunden ist. Es bietet eine integrierte Stromverteilung, redundante Netzteile für den Autopiloten, eine integrierte Failover-Stromauswahl, einen separaten Regler für die Nutzlastversorgung und viele weitere Funktionen.
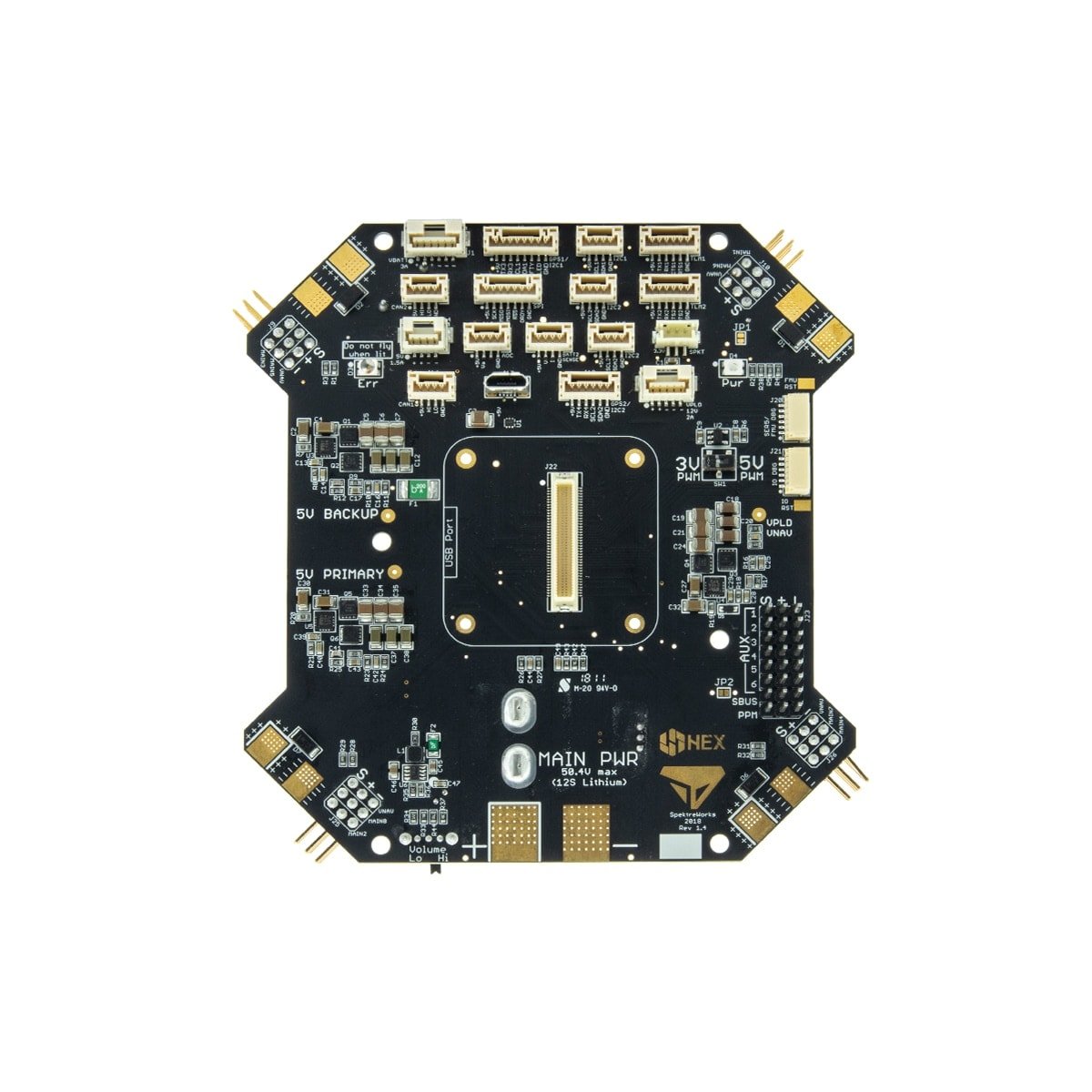
Obwohl dieses Trägerboard geometrisch für Quadcopter, X8-Konfigurationen und Octocopter optimiert ist, bietet es Anschlüsse für jede Funktion des Pixhawk-Autopiloten. Daher kann dieses Board in jeden Fahrzeugtyp integriert werden, der vom Pixhawk Cube unterstützt wird, einschließlich aller anderen Multirotor-Rahmentypen, Flugzeuge, Rover, U-Boote und Antennen-Tracker.
Hauptmerkmale
- Bis zu 12-Zellen-Lithiumbatterie (50,4V)
- 140A Dauerstrom mit 280A Spitzen
- Strom und Signal für ESCs bequem in den Ecken platziert
- 12V Navigationslichtstrom an jeder Ecke verfügbar
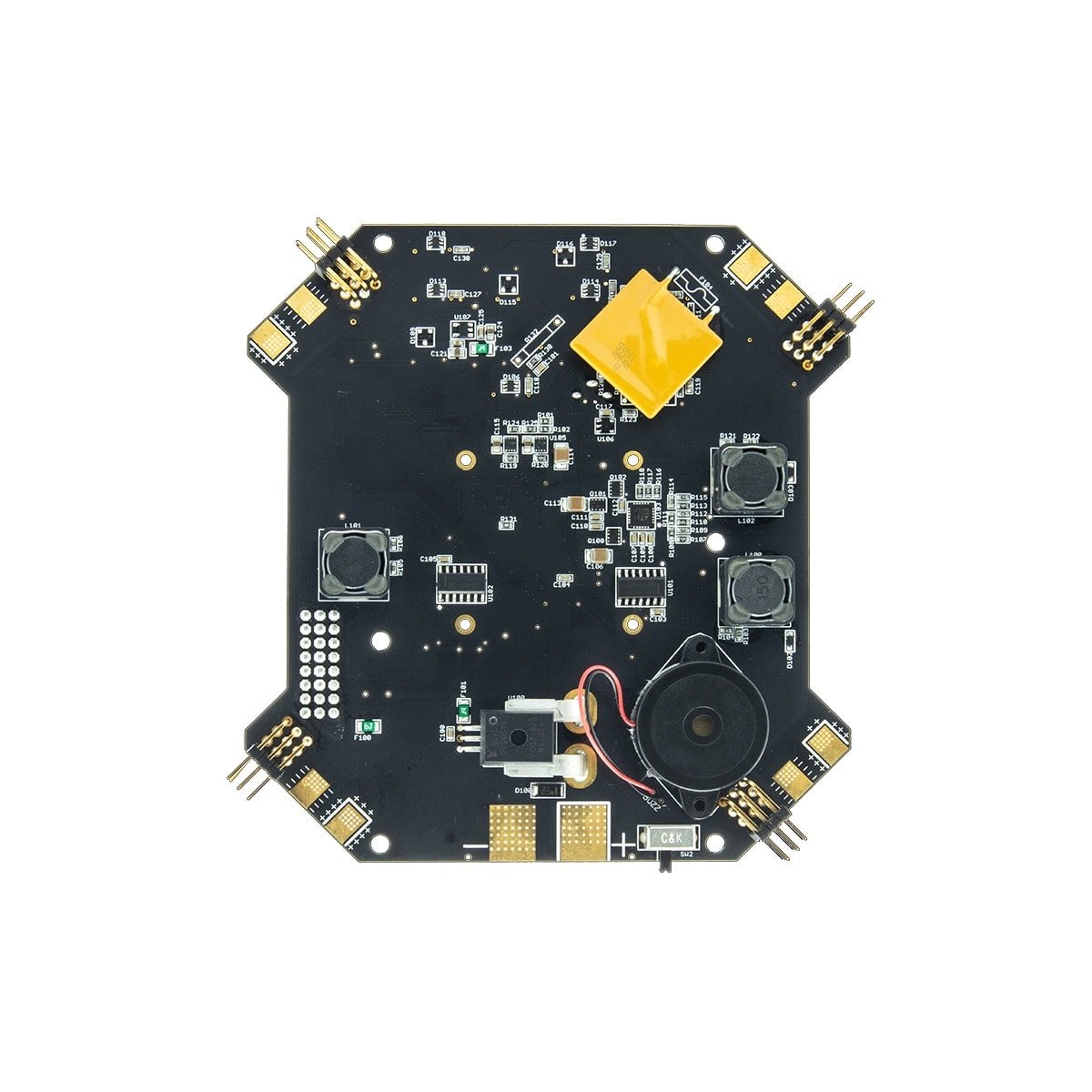
- Integrierte Stromverteilung
- Integrierte Spannungs- und Strommessung
- Redundante Netzteile für flugkritische Komponenten
- Nutzlastanschlüsse mit rücksetzbaren Sicherungen für 5V, 12V und direkte Batteriestromversorgung
- Gute Leistungs- und Fehleranzeigeleuchten
- Integrierter Buzzer mit Lautstärkeregelung
- Anschlüsse für jede Funktion des Pixhawk Cube
- Leicht zugänglicher PWM-Spannungspegelwähler (3,3V oder 5V)
- Resistent gegen Ground Bounce am PWM-Signal
- Anschlusskompatibel mit Standard ProfiCNC Trägerboard
- Anschlussports zum Debuggen von IO- und FMU-Prozessoren
Standardkabel
- 4-polig JST GH
- 6-polig JST GH
Nutzlast-Stromkabel
- 4-polig Clik-Mate 1,25mm (für 5V Nutzlaststrom)
- 5-polig Clik-Mate 1,25mm (für 12V Nutzlaststrom)
- 6-polig Clik-Mate 1,25mm (für Batterienutzlaststrom)
HINWEIS: Pixhawk 2.1 Cube NICHT enthalten.
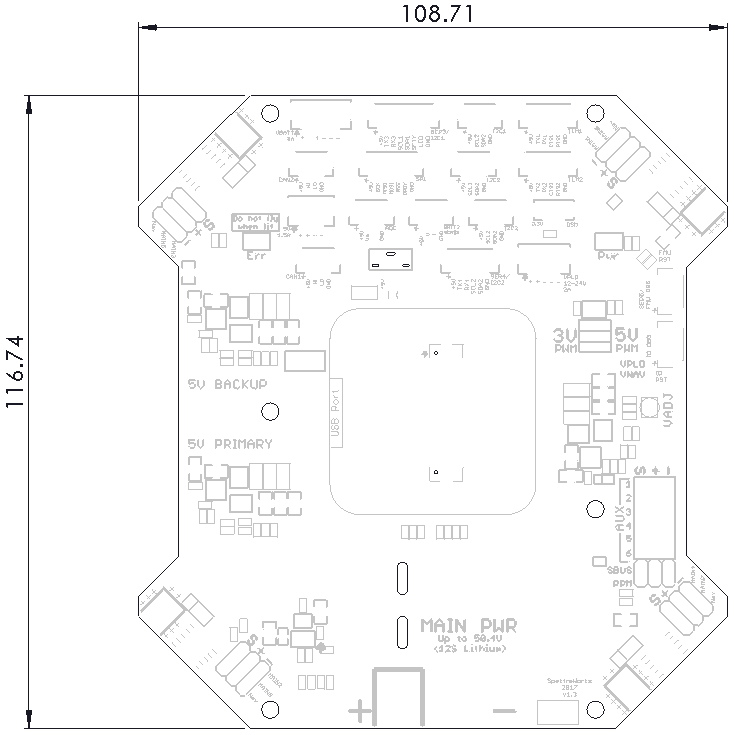
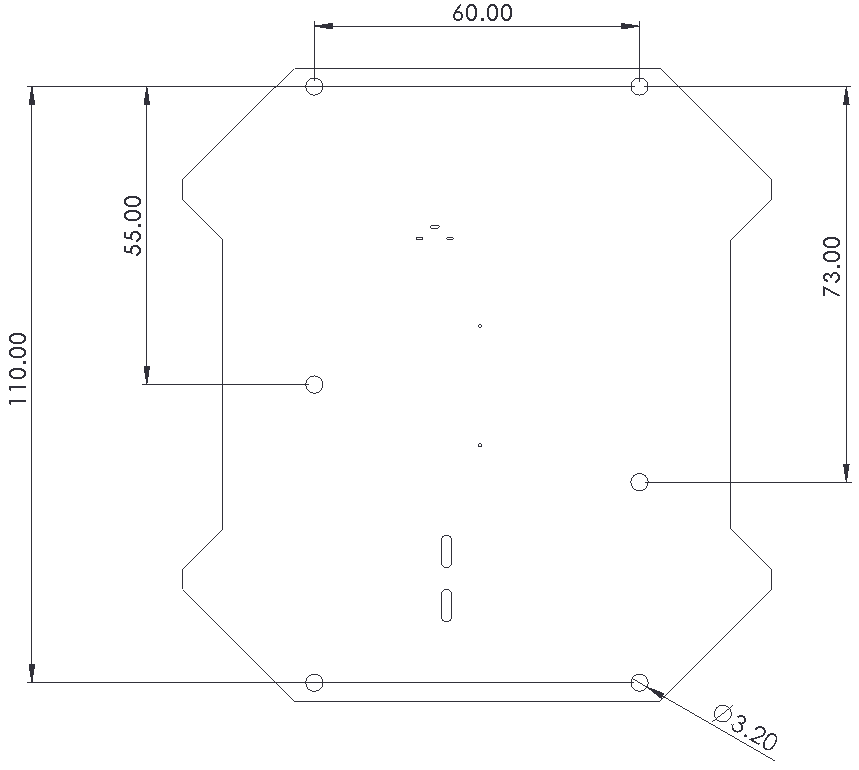
Platinengröße


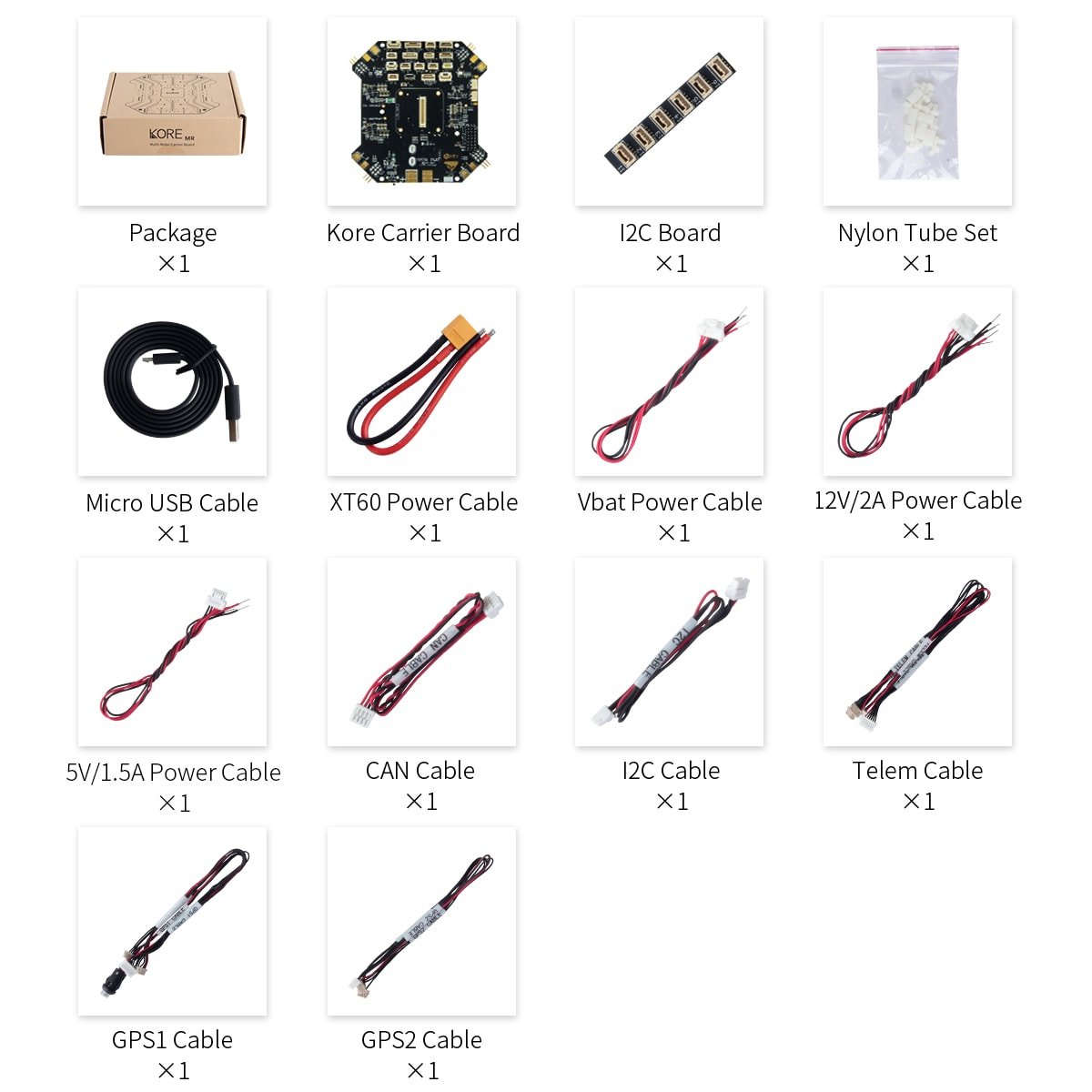
Enthalten

