



Produktdetails
Mit GPS können Sie innerhalb von 30 Sekunden überall auf der Erde wissen, wo Sie sich befinden, wohin Sie fahren und wie Sie dorthin gelangen. Das bedeutet: Je höher die Genauigkeit, desto besser! GPS Real Time Kinematics (RTK) hat die Genauigkeit seiner GPS-Module auf wenige Millimeter perfektioniert, und deshalb mussten wir es auf dieses Board bringen!
Basierend auf den SparkFun GPS-RTK2-Designs, setzt das SparkFun GPS-RTK-SMA neue Maßstäbe für hochpräzises GPS und ist das Neueste in einer Reihe leistungsstarker RTK-Boards, die das ZED-F9P-Modul von u-blox verwenden. Das ZED-F9P ist ein Top-Modul für hochgenaue GNSS- und GPS-Standortlösungen einschließlich RTK, das eine dreidimensionale Genauigkeit von 10 mm erreicht. Mit diesem Board können Sie die X-, Y- und Z-Position von Ihnen (oder jedem Objekt) innerhalb der Breite Ihres Fingernagels bestimmen! Das ZED-F9P ist einzigartig, da es sowohl als Rover als auch als Basisstation betrieben werden kann. Mit unserem praktischen Qwiic-System ist kein Löten erforderlich, um es an den Rest Ihres Systems anzuschließen. Wir haben jedoch weiterhin Pins mit 0,1"-Abstand herausgeführt, falls Sie lieber ein Steckbrett verwenden möchten.
Wir haben einen wiederaufladbaren Backup-Akku integriert, um die neueste Modulkonfiguration und Satellitendaten bis zu zwei Wochen lang verfügbar zu halten. Dieser Akku hilft, das Modul "warm zu starten", wodurch die Zeit bis zur ersten Positionsbestimmung dramatisch verkürzt wird. Dieses Modul verfügt über einen Survey-in-Modus, der es dem Modul ermöglicht, eine Basisstation zu werden und RTCM 3.x-Korrekturdaten zu erzeugen. Basierend auf Ihrem Feedback haben wir den u.FL-Anschluss durch einen SMA-Anschluss in dieser Version des Boards ersetzt.
Die Anzahl der Konfigurationsoptionen des ZED-F9P ist unglaublich! Geofencing, variable I2C-Adresse, variable Aktualisierungsraten, sogar die hochpräzise RTK-Lösung kann auf 20 Hz erhöht werden. Der GPS-RTK2 verfügt sogar über fünf Kommunikationsanschlüsse, die alle gleichzeitig aktiv sind: USB-C (der als COM-Port enumeriert wird), UART1 (mit 3,3 V TTL), UART2 für RTCM-Empfang (mit 3,3 V TTL), I2C (über die beiden Qwiic-Anschlüsse oder herausgeführte Pins) und SPI.
Wir haben auch eine umfangreiche Arduino-Bibliothek für u-blox-Module geschrieben, um das Lesen und Steuern des GPS-RTK-SMA über unser Qwiic Connect System zu vereinfachen. Lassen Sie NMEA hinter sich! Beginnen Sie mit einer viel leichteren binären Schnittstelle und gönnen Sie Ihrem Mikrocontroller (und seinem einen seriellen Port) eine Pause. Die SparkFun Arduino-Bibliothek zeigt, wie man Breitengrad, Längengrad, sogar Kurs und Geschwindigkeit über I 2 C liest, ohne dass eine ständige serielle Abfrage erforderlich ist.
Dieses Produkt erfordert eine Antenne: Jeder GNSS-Empfänger ist geeignet, dieses Board verwendet einen SMA-Antennenanschluss, aber Sie können bei Bedarf auch einen Adapter verwenden.
&feature=emb_title
Merkmale
- Gleichzeitiger Empfang von GPS, GLONASS, Galileo und BeiDou
- Empfängt sowohl L1C/A- als auch L2C-Bänder
- Spannung: 5V oder 3,3V, aber alle Logik ist 3,3V
- Strom: 68mA - 130mA (variiert je nach Konstellationen und Tracking-Status)
- Zeit bis zum ersten Fix: 25s (kalt), 2s (heiß)
-
Maximale Navigationsrate:
- PVT (grundlegende Position über UBX-Binärprotokoll) - 25Hz
- RTK - 20Hz
- Roh - 25Hz
-
Horizontale Positionsgenauigkeit:
- 2,5m ohne RTK
- 0,010m mit RTK
- Maximale Höhe: 50km (31 Meilen)
- Maximale Geschwindigkeit: 500m/s (1118mph)
- Gewicht: 6,8g
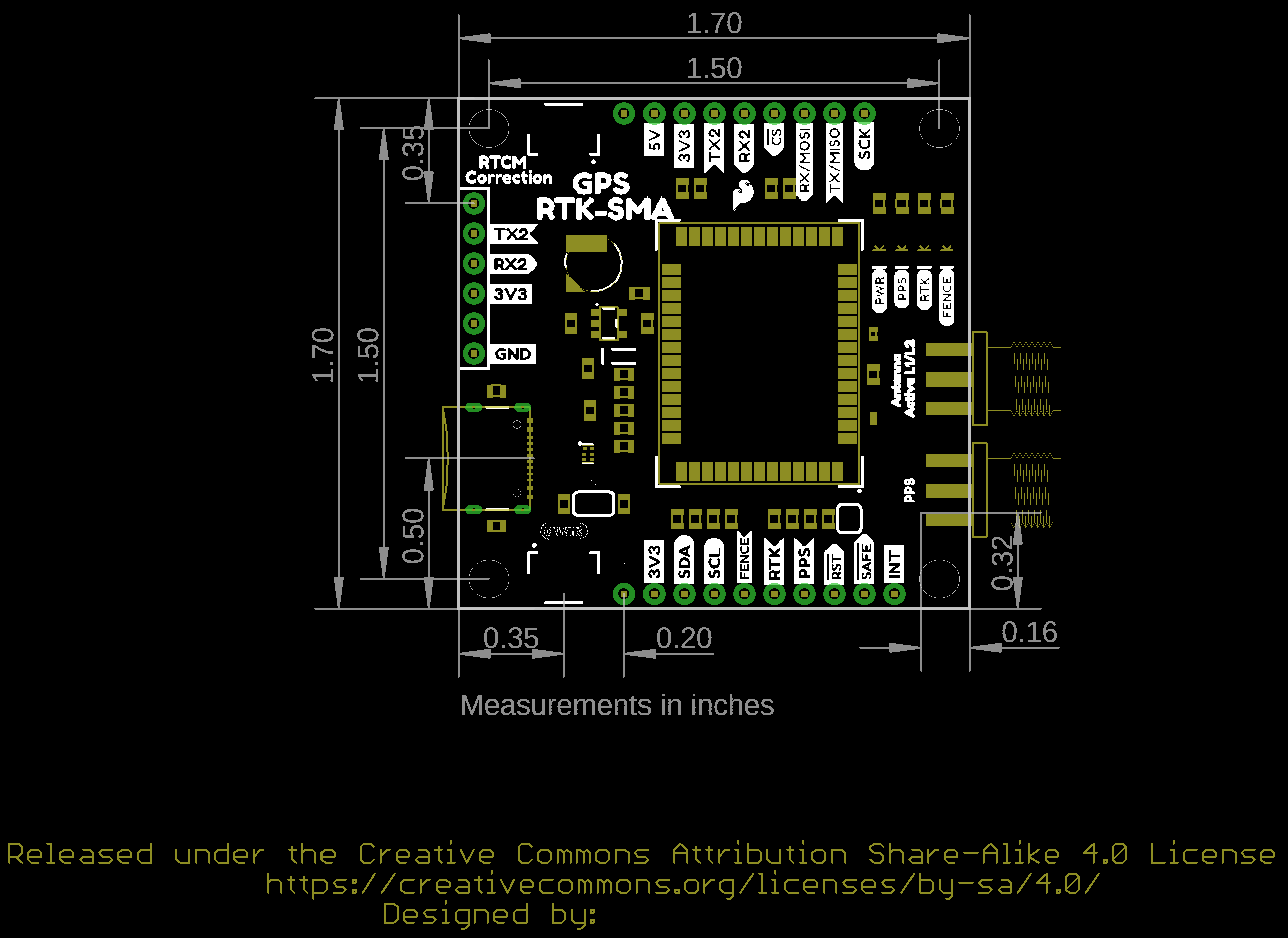
- Abmessungen: 43,5mm x 43,2mm (1,71in x 1,7in)
- 2x Qwiic-Anschlüsse
Dokumente
- Schaltplan
- Eagle-Dateien
- Montagelöcher und Abmessungen
- Anschlussanleitung
- Datenblatt (ZED-F9P)
- UBX- und NMEA-Protokollhandbuch (ZED-F9P)
- Integrationshandbuch (ZED-F9P)
- Produktübersicht (ZED-F9P)
- Versionshinweise - FW1.00 (ZED-F9P)
- Beispiel-RTCM-Ausgabe vom ZED-F9P
- U-blox ECCN
- Arduino-Bibliothek
- GitHub
{kind=link}