















Produktdetails
Hinweis Dieses Fahrzeug wird ohne vorinstallierte Software geliefert. Ein vorinstallierter USB-Stick, der eine Referenzimplementierung der lokalen Planer-Software PX4/Avoidance enthält, wird von Auterion bereitgestellt. Diese Software bietet nur ein sehr grundlegendes Beispiel dafür, was Sie mit dem PX4 Vision Autonomy Kit tun können. Entwickler können das Kit nutzen, um andere Funktionen des PX4 Avoidance-Projekts auszuprobieren, den bestehenden Code zu ändern oder mit völlig neuen, auf Computer Vision basierenden Funktionen zu experimentieren.
Bitte lesen Sie den PX4-Leitfaden für detaillierte Informationen zu diesem Entwicklungskit .

Kit-Inhalt
Das PX4 Vision DevKit enthält folgende Komponenten:
-
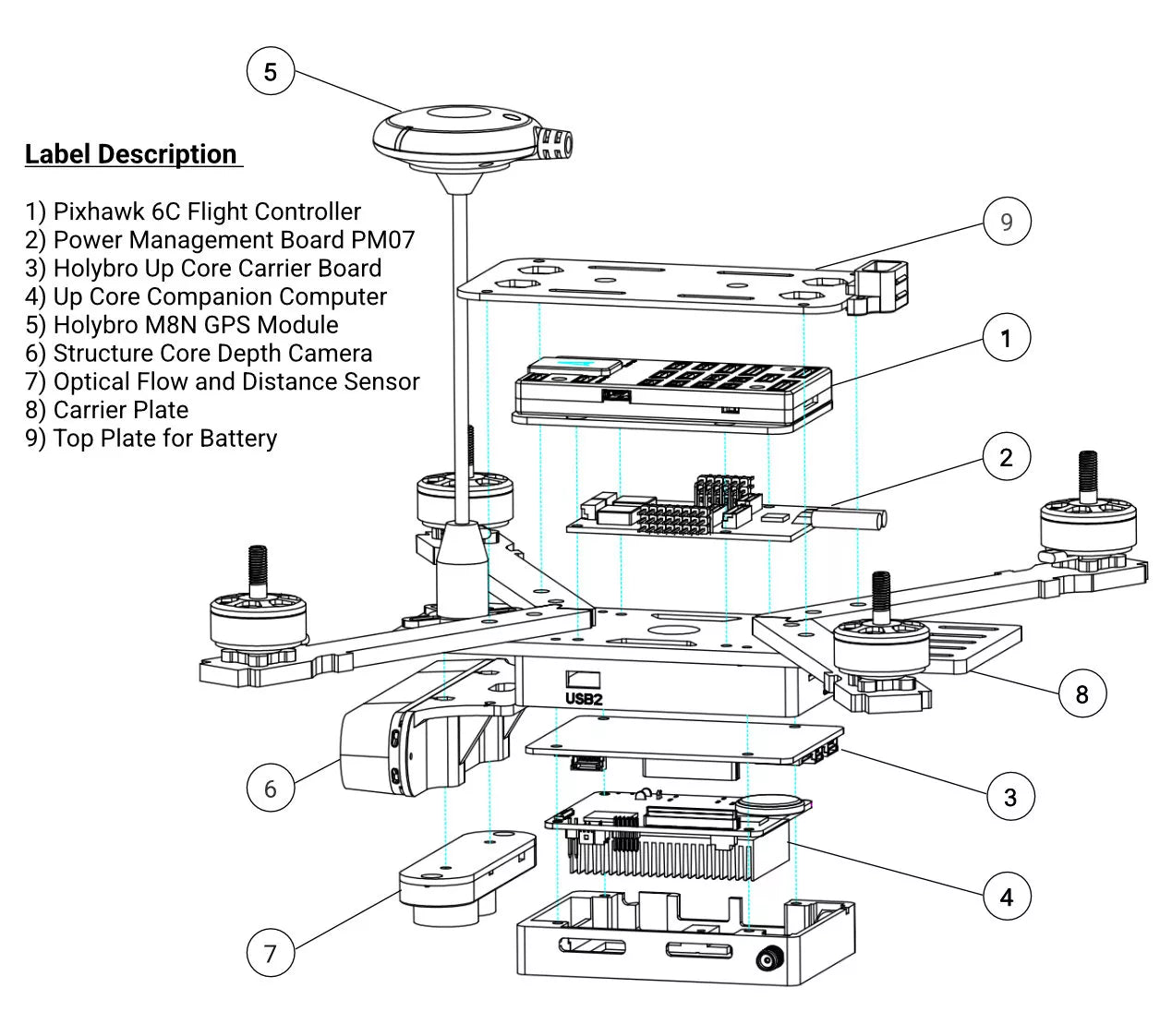
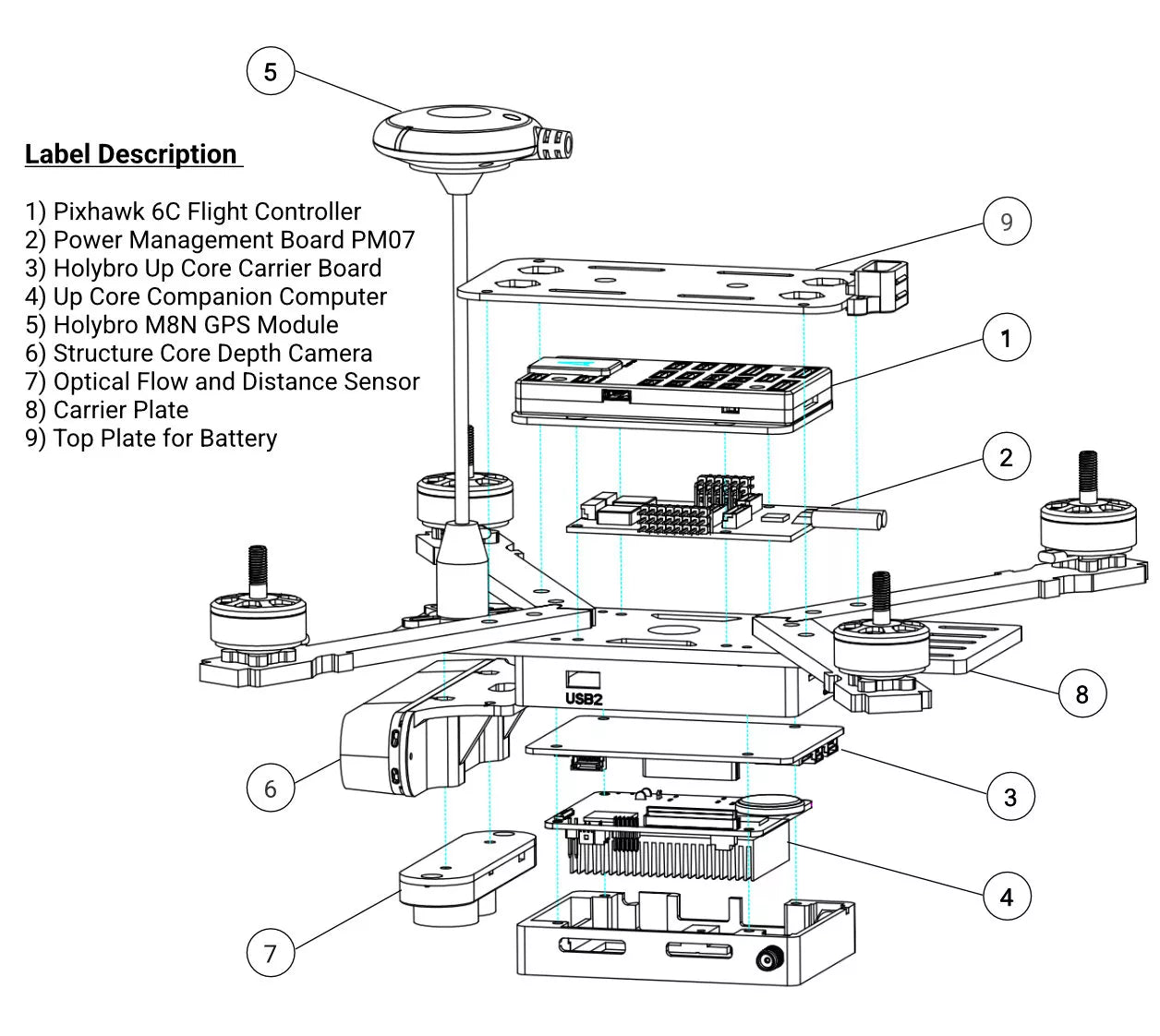
Kernkomponenten:
-
1x Pixhawk 6C Flugcontroller (Neu mit v1.5)
-
1x PMW3901 optischer Flusssensor (Anschluss über seriell)
-
1x TOF Infrarot-Distanzsensor (PSK‐CM8JL65‐CC5)
-
1x Structure Core Tiefenkamera
-
160 Grad Weitwinkelkamera
-
Stereo-Infrarotkameras
-
Onboard-IMU
-
Leistungsstarker NU3000 Multi-Core-Tiefenprozessor
-
-
1x UP Core Computer (4GB Speicher & 64GB eMMC mit Ubuntu und PX4 Avoidance)
-
Intel® Atom x5-z8350 (bis zu 1.92 GHz)
-
Kompatible Betriebssysteme: Microsoft Windows 10 Vollversion, Linux (ubilinux, Ubuntu, Yocto), Android
-
FTDI UART mit Flugcontroller verbunden
-
USB1: USB3.0 A-Port zum Booten der PX4 Avoidance-Umgebung von einem USB2.0-Stick (Anschluss eines USB3.0-Peripheriegeräts kann GPS stören). -
USB2: USB2.0-Port an einem JST-GH-Anschluss. Kann für eine zweite Kamera, LTE usw. verwendet werden (oder Tastatur/Maus während der Entwicklung). -
USB3: USB2.0 JST-GH-Port mit Tiefenkamera verbunden -
HDMI: HDMI-Ausgang -
SD-Kartensteckplatz
-
WiFi 802.11 b/g/n @ 2.4 GHz (an externer Antenne #1 angeschlossen). Ermöglicht dem Computer den Zugriff auf das Heim-WLAN-Netzwerk für Internetzugang/Updates.
-
-
-
Mechanische Spezifikation:
-
Rahmen: Vollständige 5mm 3k Kohlefaser-Köperbindung
-
Motoren: T-MOTOR P2207 V3.0 KV1750 (Neu mit v1.5)
-
ESC: BEHEli-S 20A ESC
-
Propeller: 6030-3 (Neu mit v1.5)
-
GPS: Holybro M8N GPS-Modul mit Kohlefaser-Mast
-
Power-Modul: Holybro PM07
-
Radstand: 286mm
-
Gewicht: 893 Gramm ohne Batterie oder Propeller
-
Telemetrie: ESP8266 mit Flugcontroller verbunden (an externer Antenne #2 angeschlossen). Ermöglicht drahtlose Verbindung zur Bodenstation.
-
-
Ein USB2.0-Stick mit vorinstallierter Software von Auterion, die Folgendes umfasst:
-
Ubuntu 18.04 LTS
-
ROS Melodic
-
Occipital Structure Core ROS-Treiber
-
MAVROS
-
-
Verschiedene Kabel, 8x Propeller, 2x Batteriebänder (installiert) und weiteres Zubehör (diese können zum Anbringen weiterer Peripheriegeräte verwendet werden).

Was Sie sonst noch benötigen
Das Kit enthält alle wesentlichen Drohnen-Hardware mit Ausnahme einer Batterie und eines Funksteuersystems, die separat erworben werden müssen:
-
Batterie:
- 4S LiPo mit XT60 Buchse
- Weniger als 115 mm lang (damit sie zwischen den Stromanschluss und den GPS-Mast passt)
-
Funksteuersystem
- Jedes PX4-kompatible RC-System kann verwendet werden.
- Ein FrSky Taranis Sender mit R-XSR Empfänger ist eine der beliebtesten Konfigurationen.
- Ein H2.0 Inbusschlüssel (um die obere Platte abzuschrauben, damit ein RC-Empfänger angeschlossen werden kann)
Darüber hinaus benötigen Benutzer eine Bodenstationshardware/-software:
- Computer oder Tablet mit QGroundControl (QGC)
