












Produktdetails
Der Pixhawk® 4 Mini Autopilot wurde für Ingenieure und Hobbyisten entwickelt, die die Leistung des Pixhawk 4 nutzen möchten, aber mit kleineren Drohnen arbeiten. Der Pixhawk 4 Mini übernimmt den FMU-Prozessor und die Speicherressourcen vom Pixhawk 4, während Schnittstellen, die normalerweise ungenutzt bleiben, eliminiert werden. Dies ermöglicht es dem Pixhawk 4 Mini, klein genug zu sein, um in eine 250mm Renndrohne zu passen.
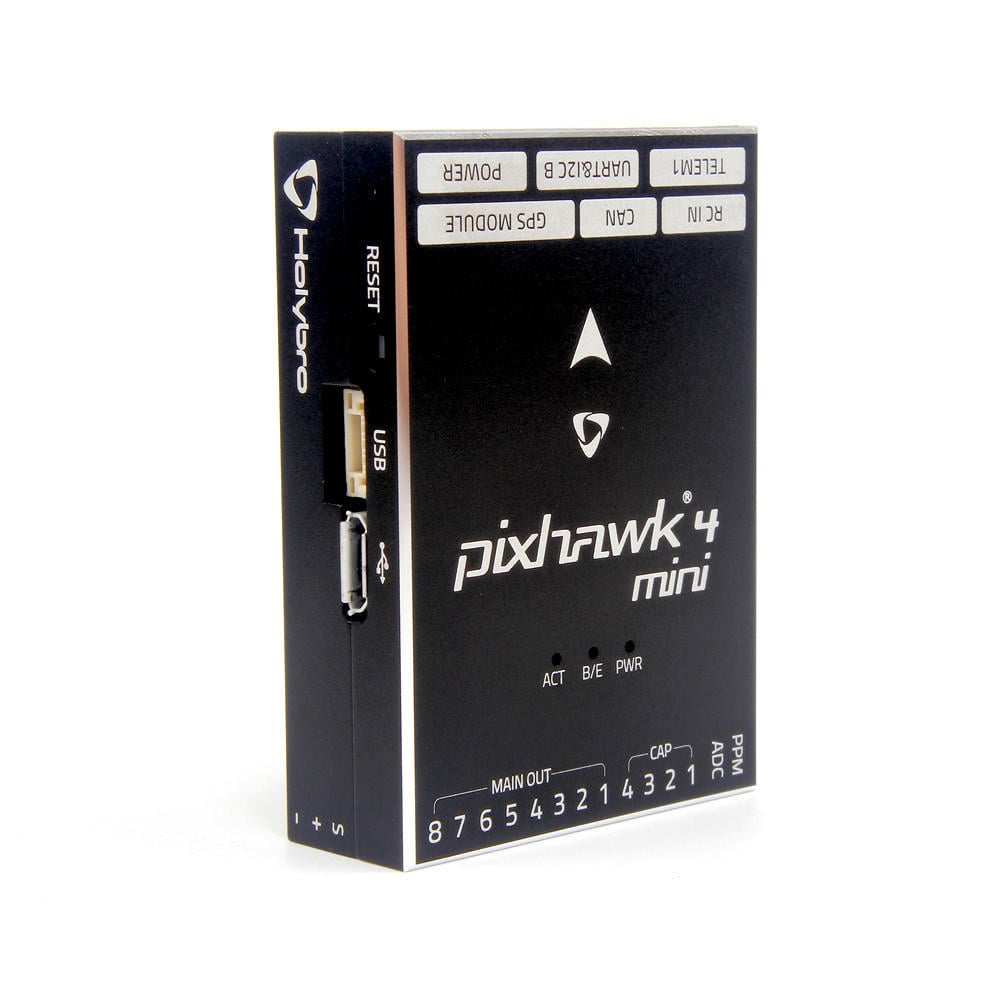
Der Pixhawk 4 Mini wurde in Zusammenarbeit mit Holybro® und Auterion® entworfen und entwickelt. Er basiert auf dem Pixhawk FMUv5 Designstandard und ist für den Betrieb der PX4 Flugsteuerungssoftware optimiert.
- Haupt-FMU-Prozessor: STM32F765, 32 Bit Arm® Cortex®-M7, 216MHz, 2MB Speicher, 512KB RAM
- On-Board-Sensoren: Beschleunigungsmesser/Gyroskop: ICM-20689, Beschleunigungsmesser/Gyroskop: BMI055, Magnetometer: IST8310, Barometer: MS5611, GPS: ublox Neo-M8N GPS/GLONASS Empfänger; integriertes Magnetometer IST8310
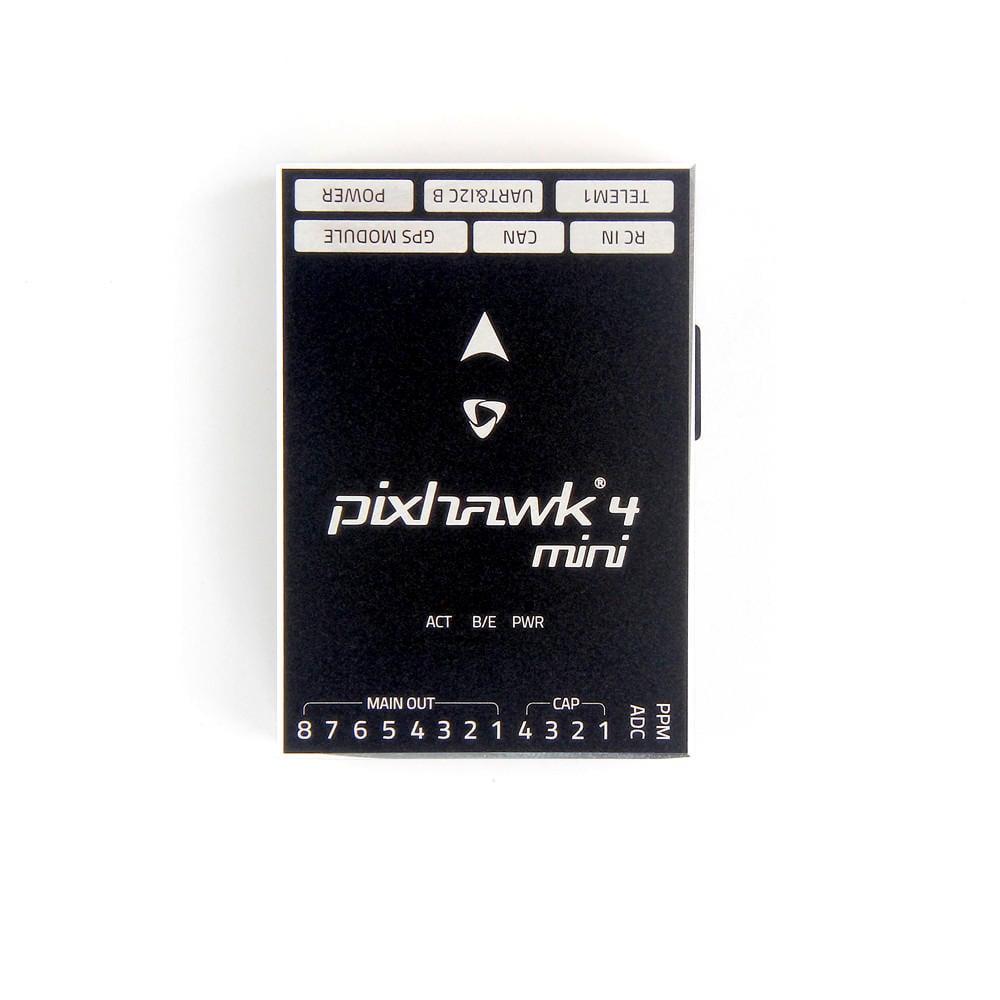
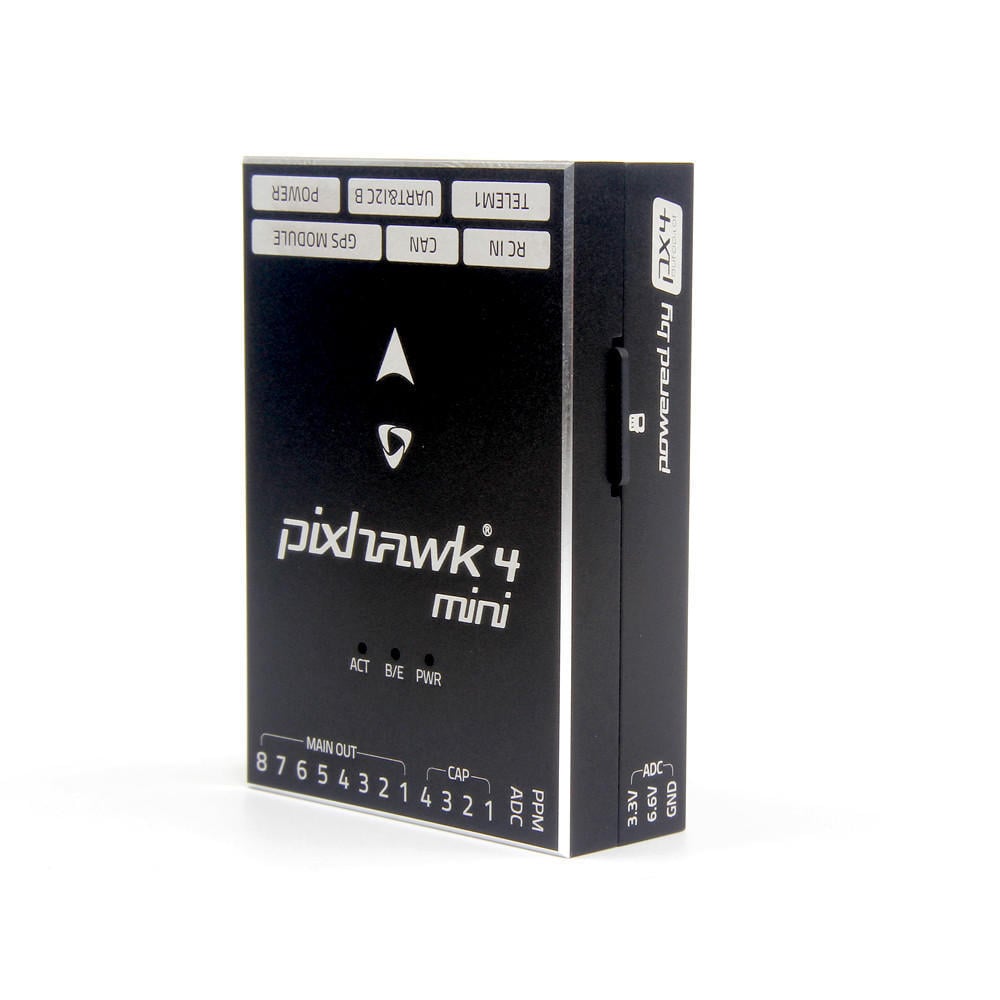
- Schnittstellen: 8 PWM-Ausgänge, 4 dedizierte PWM-/Capture-Eingänge auf FMU, dedizierter R/C-Eingang für CPPM, dedizierter R/C-Eingang für Spektrum / DSM und S.Bus mit analogem / PWM RSSI-Eingang, 3 allgemeine serielle Ports, 2 I2C-Ports, 3 SPI-Busse, 1 CAN-Bus für CAN ESC, analoge Eingänge für Spannung / Strom der Batterie, 2 zusätzliche analoge Eingänge
- Stromversorgungssystem: Power Brick Eingang: 4,75~5,5V, USB Stromversorgungseingang: 4,75~5,25V, Servo Rail Eingang: 0~24V, Max. Stromerfassung: 120A
Lieferumfang
- Pixhawk® 4 Mini Flugregler
- Energieversorgungsplatine
- Kabelsätze