








Produktdetails
 Hinweis:
Dies ist das Pixhawk 4 Combo-Paket und wird daher sowohl mit dem M8N GPS-Modul als auch mit dem PM07 Leistungsmodul geliefert. Wir verkaufen auch den
Pixhawk 4 Flugregler
einzeln.
Hinweis:
Dies ist das Pixhawk 4 Combo-Paket und wird daher sowohl mit dem M8N GPS-Modul als auch mit dem PM07 Leistungsmodul geliefert. Wir verkaufen auch den
Pixhawk 4 Flugregler
einzeln.
Pixhawk ® 4 ist das neueste Update der erfolgreichen Familie der Pixhawk Flugregler. Er wurde in Zusammenarbeit mit Holybro und dem PX4-Team entworfen und entwickelt, ist für die Ausführung des vollständigen Dronecode-Stacks optimiert und wird mit der neuesten PX4-Firmware (v1.7) vorinstalliert geliefert.
Er verfügt über die derzeit fortschrittlichste Prozessortechnologie von ST Microelectronics ®, Sensortechnologie von Bosch ®, InvenSense ® und ein NuttX Echtzeitbetriebssystem, das unglaubliche Leistung, Flexibilität und Zuverlässigkeit für die Steuerung jedes autonomen Fahrzeugs bietet.
Der Mikrocontroller des Pixhawk 4 verfügt nun über einen 2 MB Flash-Speicher und 512 KB RAM. Mit den erhöhten Leistungs- und RAM-Ressourcen können Entwickler bei ihrer Entwicklungsarbeit produktiver und effizienter sein. Komplexere Algorithmen und Modelle können auf diesem Autopiloten implementiert werden.
Leistungsstarke, rauscharme IMUs an Bord sind für Stabilisierungsanwendungen konzipiert. Datenbereite Signale von allen Sensoren werden zu separaten Interrupt- und Timer-Erfassungs-Pins am Autopiloten geleitet, was eine präzise Zeitstempelung der Sensordaten ermöglicht. Neu entwickelte Vibrationsisolierungen ermöglichen genauere Messwerte, wodurch Fahrzeuge eine bessere Gesamtflugleistung erreichen.
Die zwei externen SPI-Busse und sechs zugehörigen Chip-Select-Leitungen ermöglichen das Hinzufügen weiterer Sensoren und SPI-basierter Nutzlasten. Es gibt insgesamt vier I2C-Busse, zwei davon für den externen Gebrauch und zwei gruppiert mit seriellen Ports für GPS/Kompass-Module.
Das Pixhawk 4 Autopilot-Entwicklungskit ist perfekt für Entwickler in Unternehmensforschungslaboren, Start-ups und für Akademiker (Forschung, Professoren, Studenten).
Schnittstellen
- 8-16 PWM-Servoausgänge (8 von IO, 8 von FMU)
- 3 dedizierte PWM/Capture-Eingänge am FMU
- Dedizierter R/C-Eingang für CPPM
- Dedizierter R/C-Eingang für Spektrum / DSM und S.Bus mit analogem / PWM-RSSI-Eingang
- Dedizierter S.Bus-Servoausgang
- 5 universelle serielle Ports, 2 mit Vollduplex-Flusskontrolle, 1 mit separater 1,5 A Strombegrenzung
- 3 I2C-Ports
-
4 SPI-Busse
-
1 interner Hochgeschwindigkeits-SPI-Sensorbus mit 4 Chip-Selects und 6 DRDYs
-
1 interner rauscharmen SPI-Bus, dediziert für Barometer mit 2 Chip-Selects, keine DRDYs
-
1 interner SPI-Bus, dediziert für FRAM
-
Unterstützt dediziertes SPI-Kalibrier-EEPROM auf dem Sensormodul
-
1 externer SPI-Bus
- Bis zu 2 CAN-Busse für Dual-CAN mit seriellem ESC, jeder CAN-Bus verfügt über individuelle Stummschaltungssteuerungen oder ESC-RX-MUX-Steuerung
- Analoge Eingänge für Spannung/Strom von 2 Batterien
- 2 zusätzliche analoge Eingänge
Elektrische Daten, Spannungsbewertungen:
- Leistungsmodulausgang: 4.9~5.5V
- Max. Eingangsspannung: 6V
- Max. Strommessung: 120A
- USB-Stromeingang: 4.75~5.25V
- Servoschieneingang: 0~36V
Umweltdaten, Qualität & Zuverlässigkeit
- Betriebstemp. ~40~85C
- Lagertemp. -40~85C
- CE
- FCC
- RoHS-konform (bleifrei)
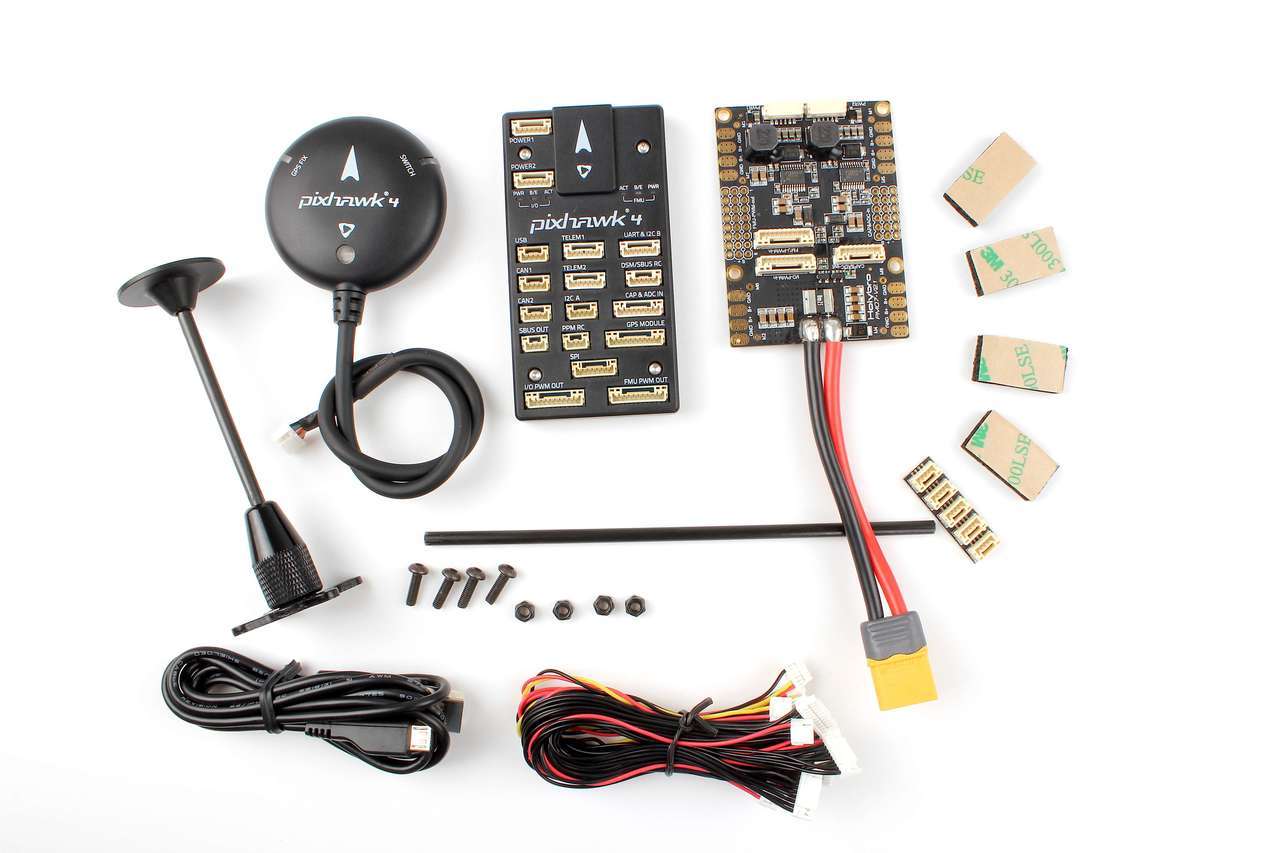
Das Paket enthält:
- Pixhawk4 *1
- Pixhawk4 GPS MODUL *1
- Pixhawk 4 Power Management Board *1
- I2C Splitter Board *1
- 6 auf 6 Pin Kabel (Strom) *3
- 4 auf 4 Pin Kabel (CAN) *2
- 6 auf 4 Pin Kabel (Daten) *1
- 10 auf 10 Pin Kabel (PWM) *2
- 8 auf 8 Pin Kabel (AUX) *1
- PPM/SBUS Out Kabel *1
- XSR Empfängerkabel *1
- DSMX Empfängerkabel *1
- SBUS Empfängerkabel *1
- USB-Kabel *1
- "X"-Typ klappbarer Sockelhalter *1
- 70mm & 140mm Carbonstab-Abstandshalter *2
- 6*3 2.54mm Rastermaß Horizontaler Pin *1
- 8*3 2.54mm Rastermaß Horizontaler Pin *1
- Schaumstoff-Set *1
- Pixhawk4 Kurzanleitung *1
- GPS Kurzanleitung *1
Ressourcen:
Für weitere Informationen (wie Pinbelegung und Datenblatt) siehe das Pixhawk 4 Handbuch .