































Produktdetails
Hinweis: Wie alle unsere Airbot-Produkte ist dies die echte originale Airbot-Platine - kein Klon.
Die Omnibus-Serie von Flugsteuerungen ist bekannt als die beste All-in-One-integrierte Flugsteuerung, die die beste Auswahl an Sensoren und Teilen zu einem günstigen Preis und in einem kleinen Formfaktor verwendet. Die neueste Ergänzung der Serie verwendet jetzt den leistungsstarken STM32 F405 MCU. Der Omnibus F4 verwendet die MPU6000/ICM-20608 IMU über SPI für extrem schnelle Gyro-Updates (bis zu 32Khz), um mit dem schnellen F4 MCU Schritt zu halten, sodass Sie Ihre Betaflight/iNav-Steuerungsschleife wahnsinnig schnell laufen lassen können. Dies verschafft Ihnen einen zusätzlichen Vorteil beim Rennen mit Ihrem FPV-Quadrocopter.
Der AB7456 OSD-Chip (ein verbesserter MAX7456) ermöglicht die direkte Konfiguration und Updates direkt innerhalb von Betaflight. Dieser OSD-Chip verbraucht viel weniger Strom als der ältere MAX7456 OSD-Chip, aber der Hauptvorteil ist, dass er direkt in Betaflight konfiguriert werden kann, ohne dass ein externer FTDI oder Jumper-Schalter benötigt wird. Zusätzlich enthält der Omnibus F4 einen leistungsstarken 5V, 1,5A STM L78 Spannungsregler, der die Stromversorgung filtert und einen Spannungsschutz für die Platine bietet.
Sie können das Omnibus F4 V6 Handbuch auf dronetrest.com einsehen.
Omnibus Versionen
-
Der V6 Omnibus hat einige Änderungen:
- Neue Firmware-Ziel (OMNIBUSF4FW) - nach dem Flashen gehen Sie zu CLI und geben Sie "set gyro_to_use = second" ein und speichern Sie, um die IMU zum Laufen zu bringen.
- 5x UART-Ports
- 5V 1A und 8V BEC für FPV-Kamera
- Stromquellen-Jumper-Selektor (siehe Handbuch für weitere Informationen)
- Der V5 Omnibus enthält einen Jumper zur Auswahl der Stromquelle (siehe Pinbelegung unten für weitere Details), außerdem verwendet der Omnibus F4 V5 einen neuen 8-poligen Sh 1.0-Sockel, um den Anschluss eines 4in1 ESC wesentlich zu erleichtern. Dieser ist kompatibel mit bis zu 6S Akkus.
- Das Hauptmerkmal des V4 Omnibus ist, dass der Lötjumper zur Auswahl zwischen PPM/SBUS nicht mehr benötigt wird. Die Platine weist außerdem einige kleinere Hardware-Revisionen auf, um die Robustheit der Platine noch weiter zu erhöhen.
- Der V3 behebt einige der LDO-Probleme des V2, so dass Sie diese Platine jetzt direkt von Ihrem Akku (bis zu 4S Lipo) mit Strom versorgen können.
Hauptmerkmale
- Tantal-Kondensatoren für rauschfreie Gyro-Messwerte
- Lötpads für SmartAudio und Kamerasteuerung hinzugefügt (neben den Video-Pads)
- Ein 8V BEC und LC-Filter für die Kamera- und VTX-Stromversorgung hinzugefügt
- Diese Platine verfügt jetzt über 5 UART-Ports
- Neues Layout-Design
Spezifikationen
- STM32 F405 MCU
- SBUS-Eingang (keine PPM-Eingangsunterstützung)
- 6PWM-Ausgang
- Nur 36x36mm, Montagelöcher 30.5x30.5mm
- BMP 280 Baro
- SPI-Sensor MPU6000/ICM-20608
- 128Mbit Flash
- Direkt von 2-6S Lipo gespeist (nur v5)
Lieferumfang
- 1x Omnibus F4 Flugsteuerung
Wir liefern keine Stiftleisten mit dieser Platine, verkaufen diese aber separat auf unserer Website.
Zadig-Treiber
Wenn Sie Probleme beim Verbinden mit dem Board oder beim Hochladen neuer Firmware haben, ist die beste Lösung die Verwendung des Zadig-Treiber-Tools.
- Drücken Sie die BOOT-Taste auf dem Flugregler.
- Stecken Sie das USB-Kabel ein (die rote LED sollte nicht so hell leuchten wie normalerweise).
- Starten Sie Zadig und klicken Sie auf "Optionen" und dann auf "Alle Geräte auflisten".
- Wählen Sie aus der Liste "STM32 BOOTLOADER".
- Wählen Sie unter "Treiber" rechts "WinUSB" und klicken Sie auf "Treiber neu installieren".
Weitere Informationen finden Sie in unserem Zadig-Treiber-Tool-Tutorial
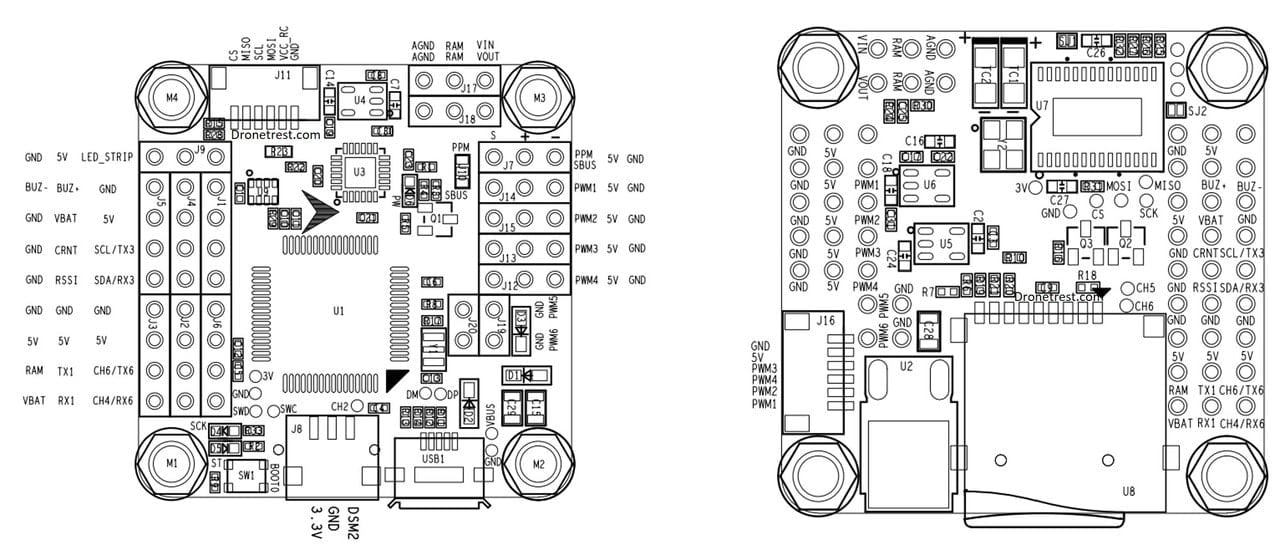
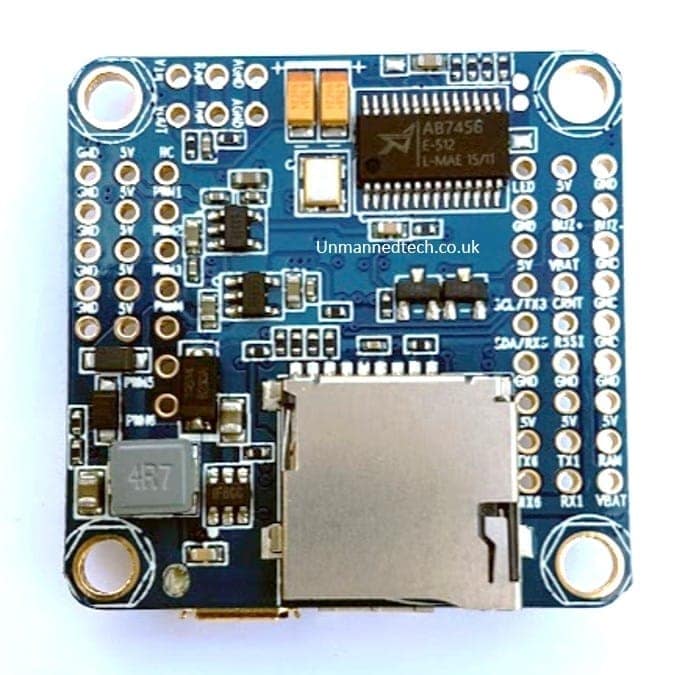
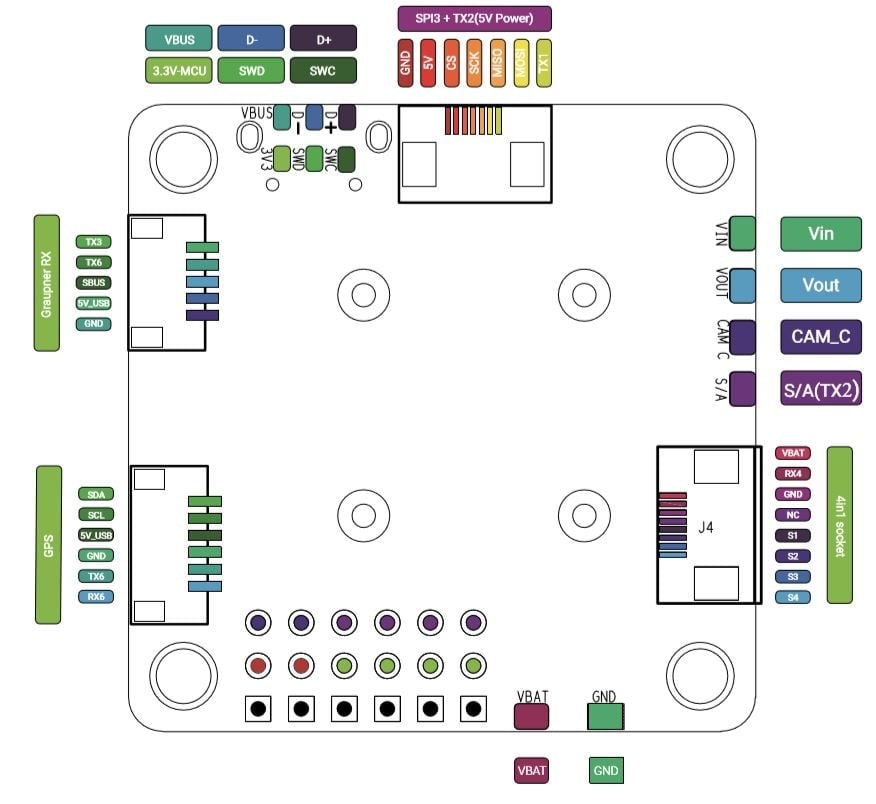
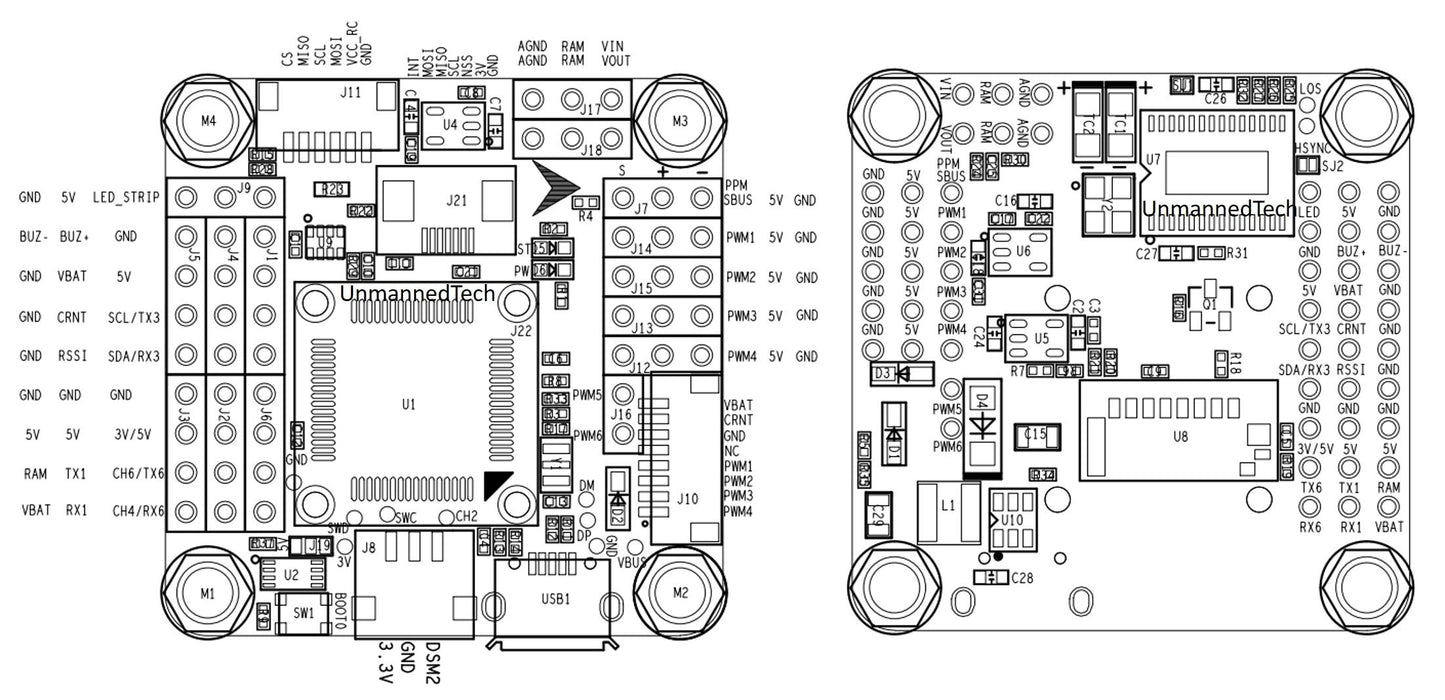
Omnibus F4 V6 Pinbelegung



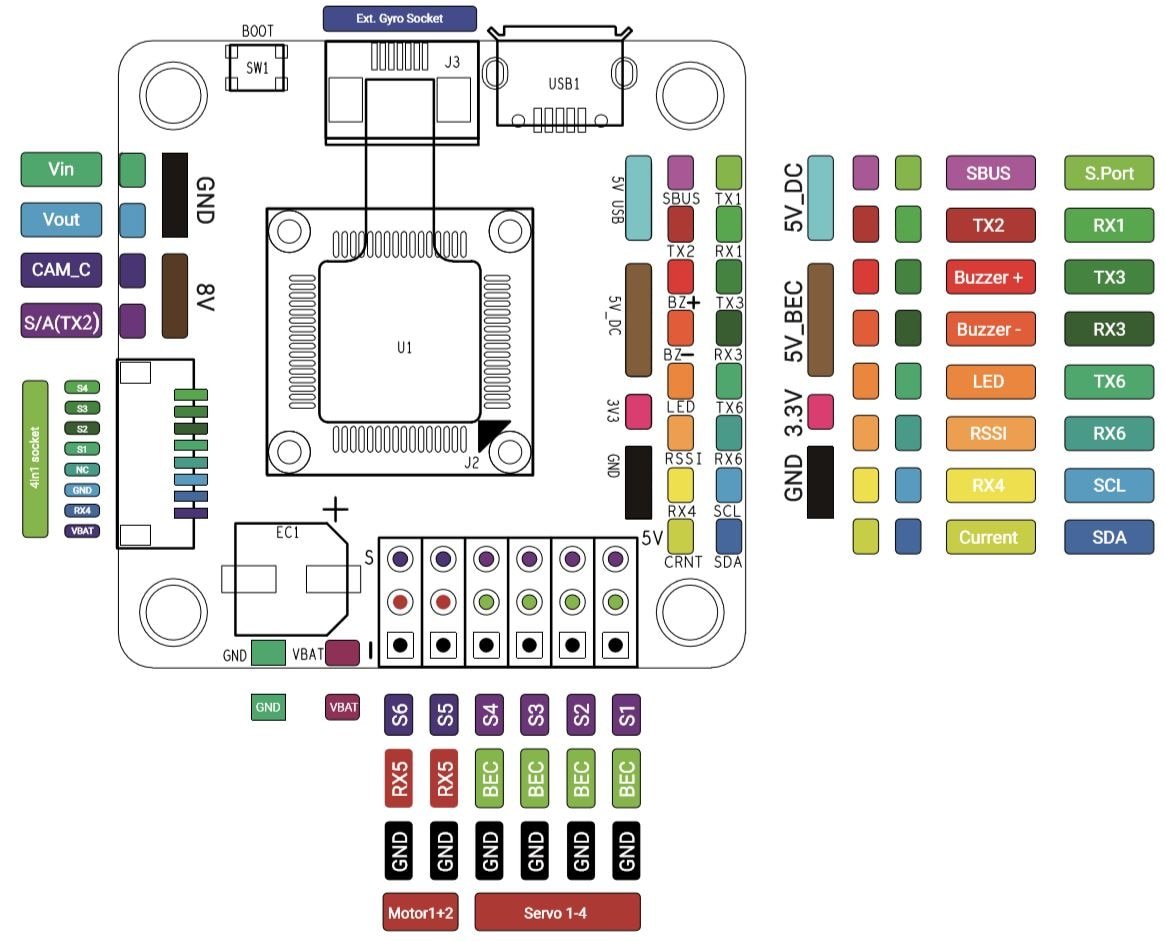
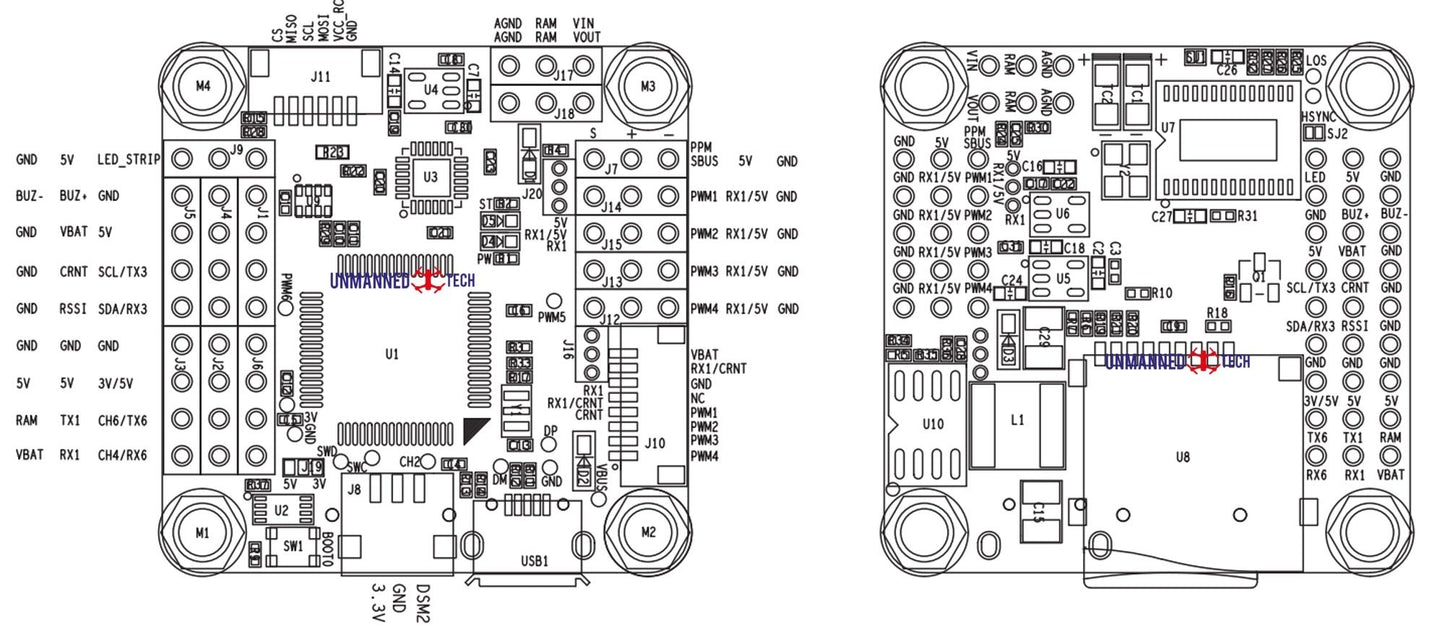
Omnibus F4 V5 Pinbelegung
Der V5 Omnibus enthält einen Jumper zur Auswahl der Stromquelle (siehe Pinbelegung unten für weitere Details), außerdem verwendet der Omnibus F4 V5 einen neuen 8-poligen Sh 1.0-Sockel, um den Anschluss eines 4in1 ESC wesentlich zu erleichtern.

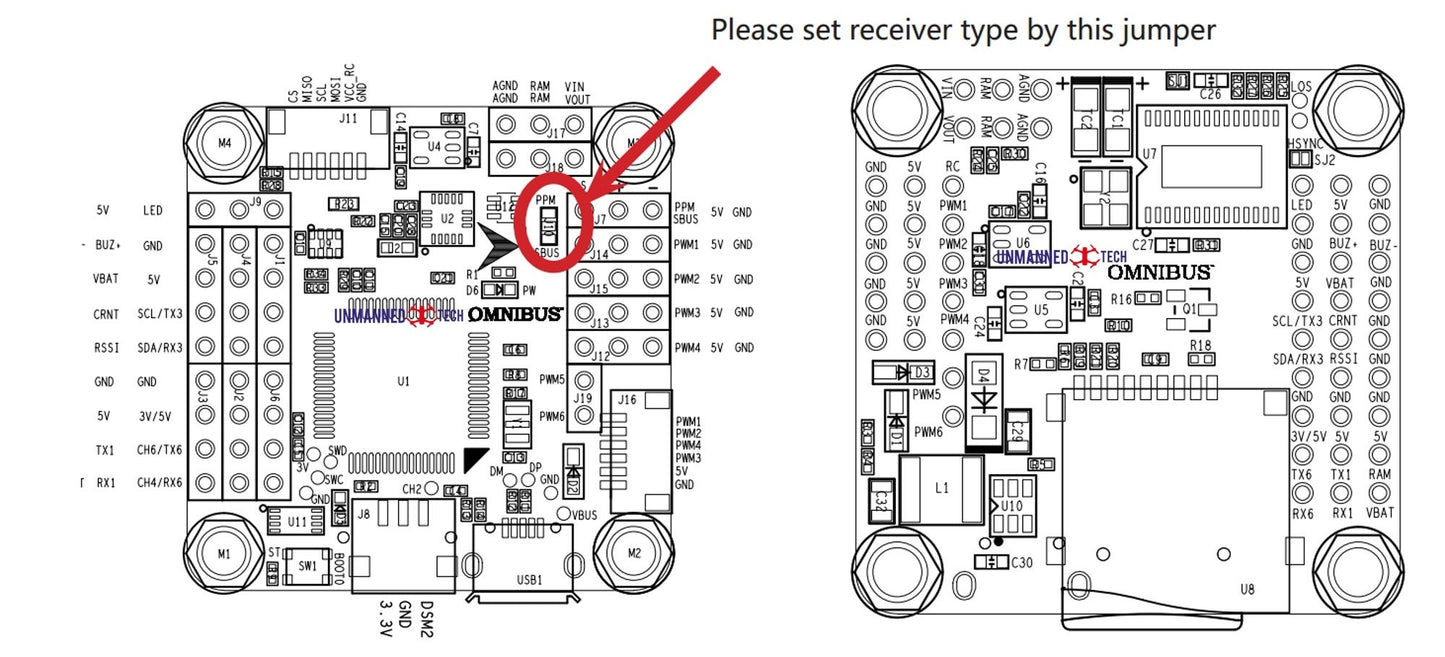
Omnibus F4 V4 Pinbelegung
Diese V4-Pinbelegung ist für Personen gedacht, die noch die ältere Version verwenden. Das bemerkenswerte Merkmal der V4-Platine ist, dass der SBUS/PPM-Lötauswahljumper entfernt wurde. Jetzt können Sie Ihren Empfänger einfach an J7 anschließen und den Typ in Betaflight auswählen.

Omnibus F4 V3 Pinbelegung
Die Pinbelegung wurde hier für frühere Kunden beibehalten, die noch den V3 Omnibus verwenden.

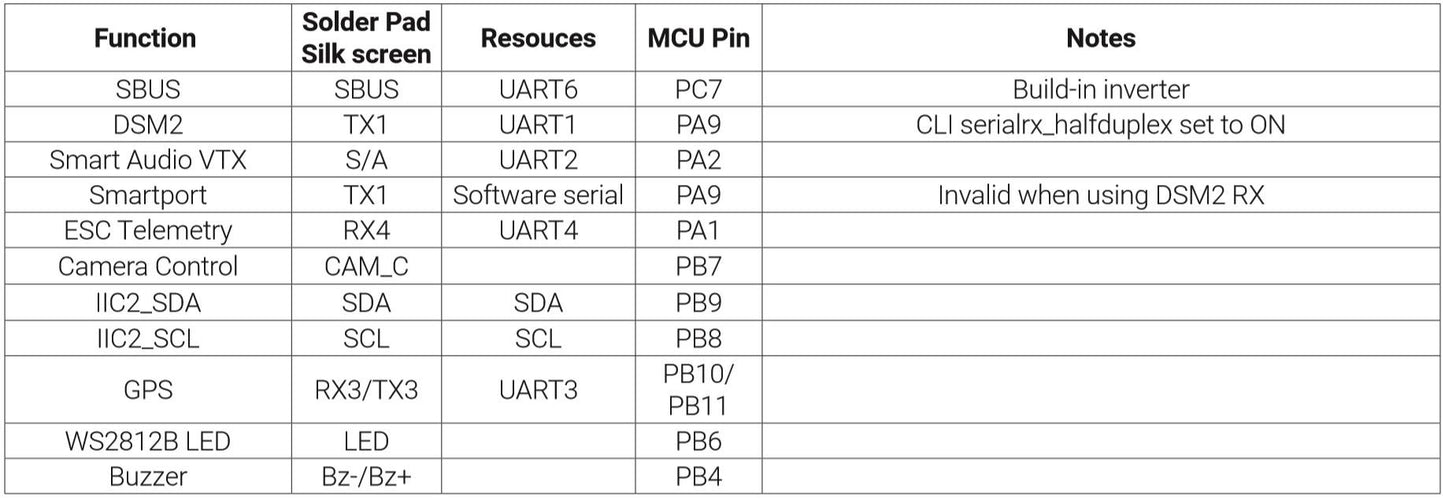
Verwendung von SBUS/PPM/DSM
Es gibt einen bekannten Fehler in Betaflight, der manchmal verhindern kann, dass Sie zwischen SBUS und PPM wechseln können. Sie müssen zuerst seriellen RX und SBUS im Konfigurations-Tab auswählen und speichern. Gehen Sie dann zum Ports-Tab und aktivieren Sie seriellen RX am UART 6 Port und speichern Sie. Gehen Sie dann zwischen den beiden hin und her, um sicherzustellen, dass die Einstellungen korrekt gespeichert wurden, da dies manchmal nicht ordnungsgemäß geschieht.
Invertiertes und nicht-invertiertes SBUS
- SBUS/PPM (J7) Header (uart6) Dies ist für invertierte Signalempfänger; hat einen festen Inverter, der nicht ausgeschaltet werden kann (durch cli-Befehl sbus_inverter=on/off)
- RX1 (an J2) (uart1), Dies ist für nicht-invertierte Signalempfänger.
Spektrum DSM
- DSM-Anschluss (an J8). Dies ist für nicht-invertierte Signalempfänger und entspricht RX1.
Probleme beim Scharfstellen:
- Wenn Sie sicher sind, dass Ihr Board korrekt eingerichtet ist, es sich aber weigert, scharfzustellen, versuchen Sie, das Gyro-Rauschlimit in der CLI mit dieser Zeile zu erhöhen: "set gyro_calib_noise_limit = 120"