










Produktdetails
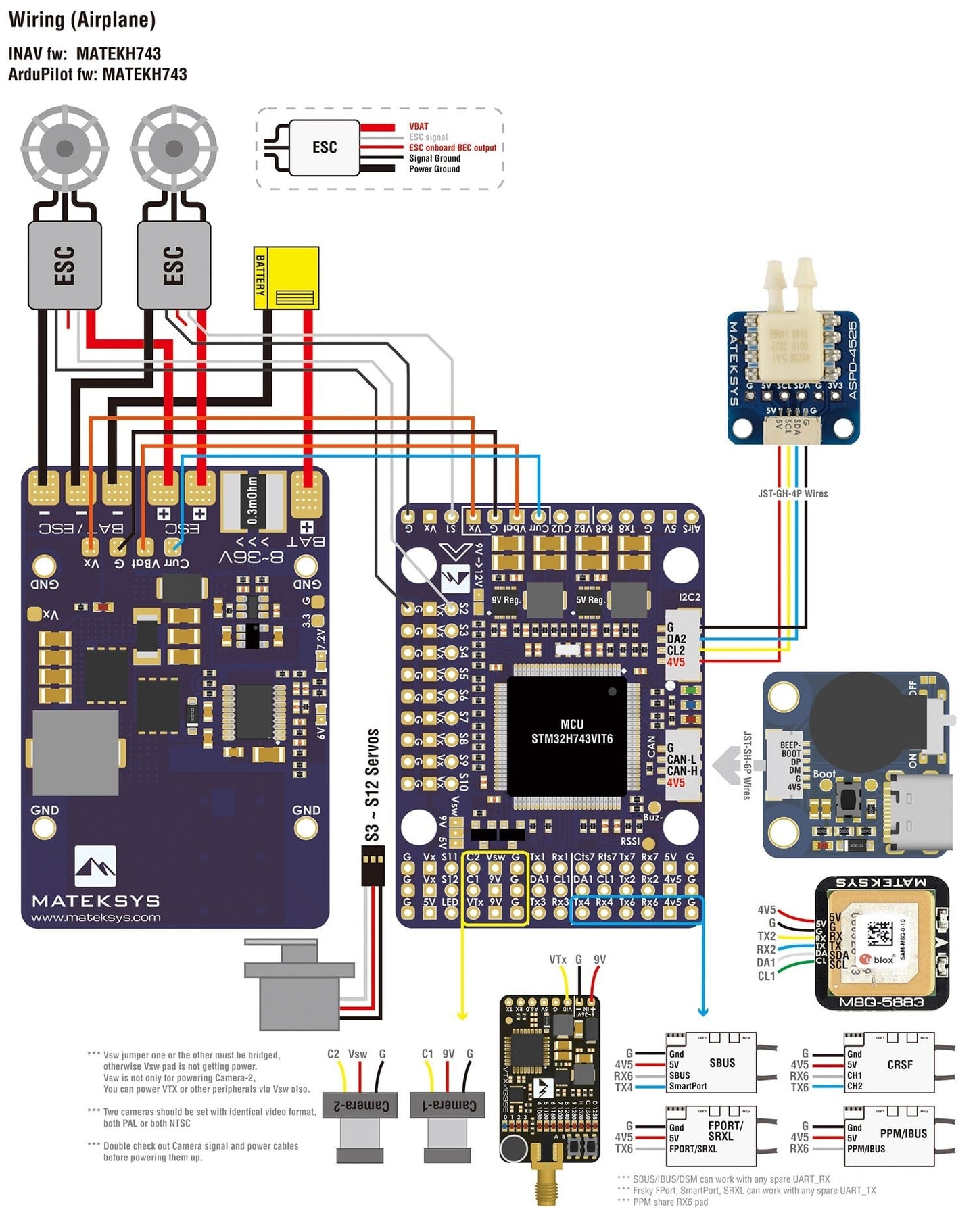
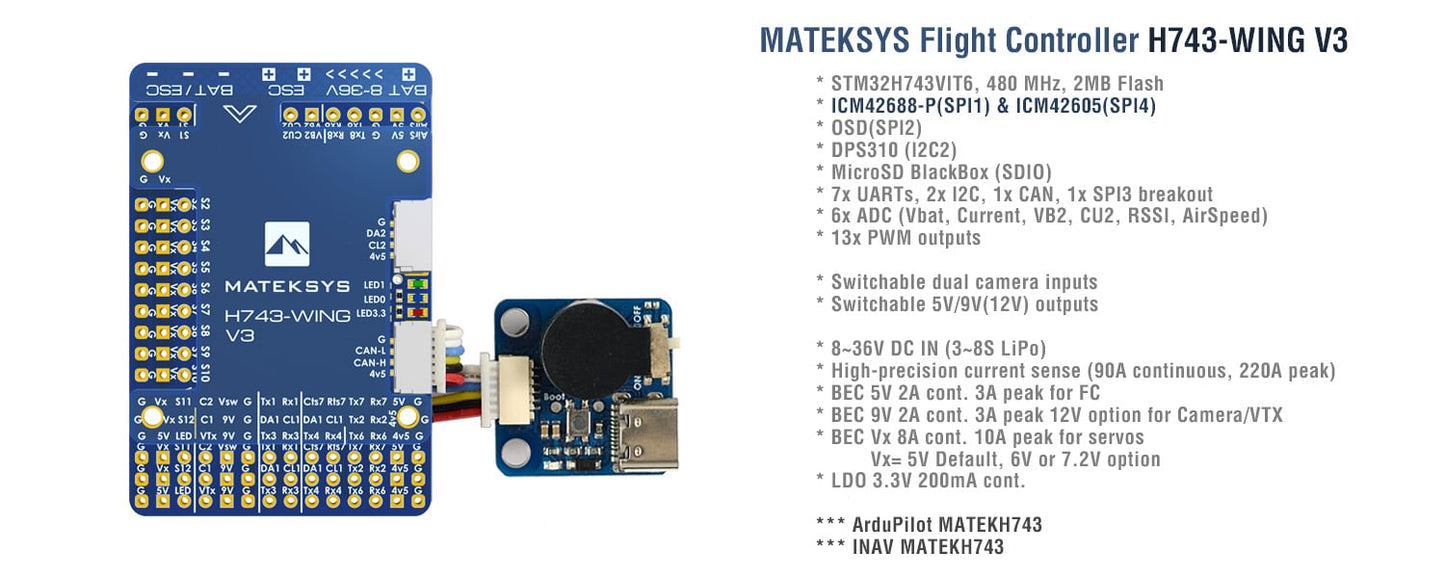
Der H743-WING v3 ist ein überarbeitetes Design des beliebten H743 Wing Flugreglers von Matek ICM42605, einige überarbeitete Anschlüsse und das Komponentenlayout machen die Platine noch besser als zuvor. Das Beste ist, dass dieser Flugregler mit Betaflight, Inav und Ardupilot verwendet werden kann.

Update auf V3
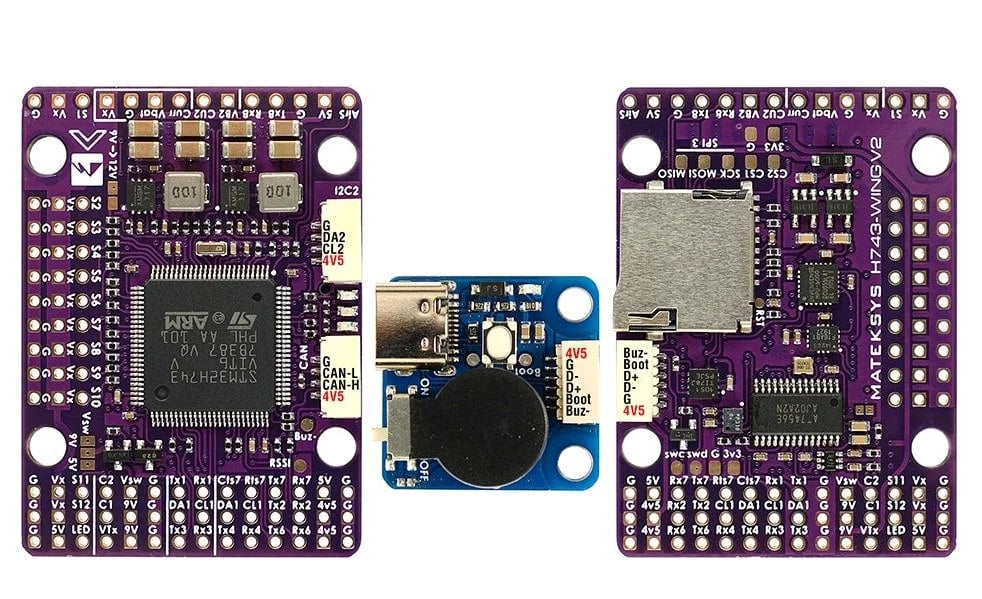
H743-WING-V2 (Lila PCB) wurde seit Ende April 2022 auf V3 (Blau PCB) aktualisiert.
IMU ICM42688-P(V3)+ICM42605 anstelle von MPU6000(V2)+ICM42605
Gleiche Funktionen, Layout, Verdrahtungsschema & I/O-Zuordnung.



Ressourcen
- Anleitung zur Ardupilot Wiki s
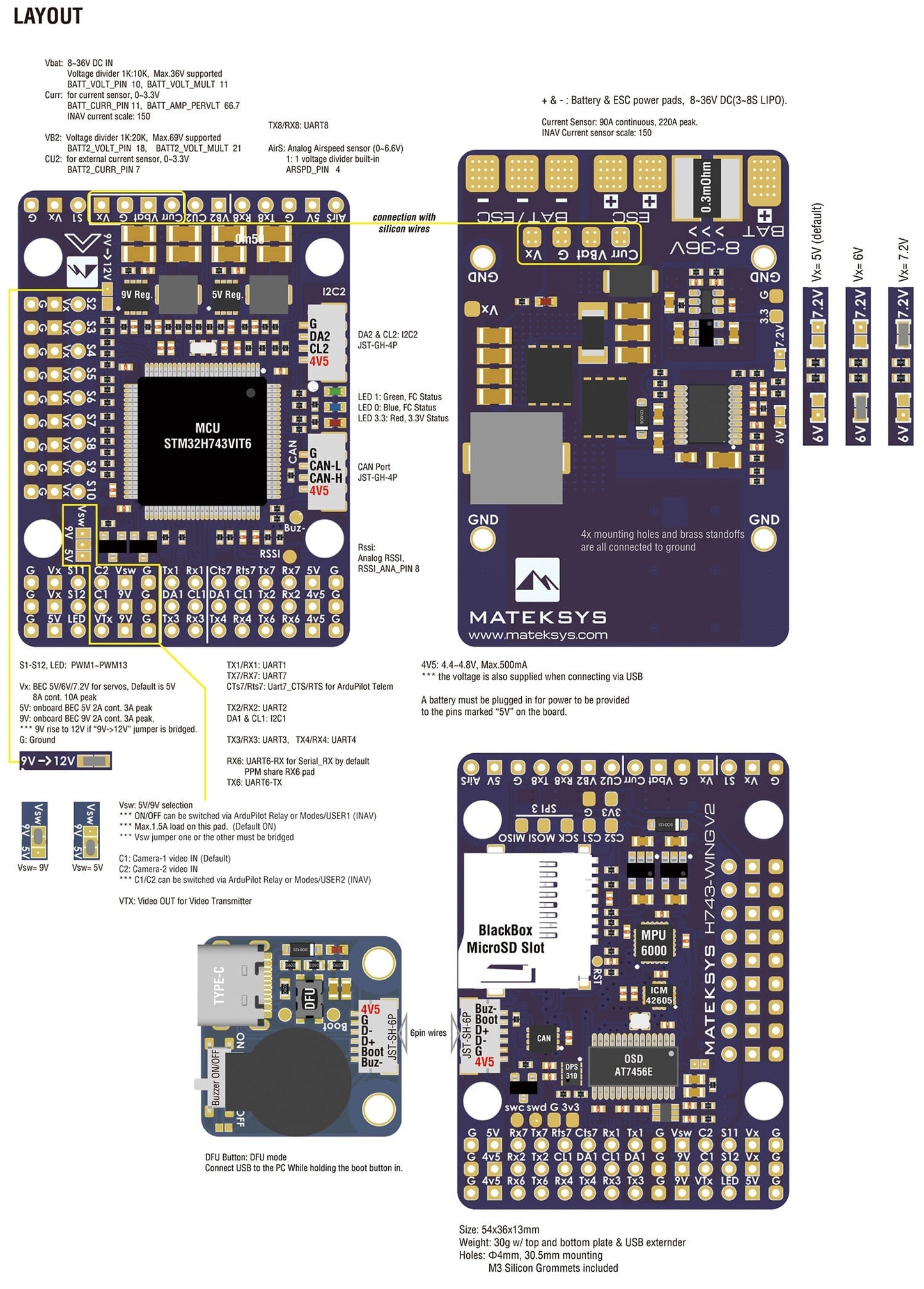
- H743-WING-V2_Handbuch (einschließlich Pinbelegung und Schaltpläne)
Spezifikationen
FC Spezifikationen
- Eingangsspannung: 3-8S LiPo
- MCU: STM32H743VIT6
- Kreisel: ICM42688-P / ICM42605
- OSD: Ja
- UARTs: 8 Sätze
- ESC-Anschlüsse: Ja
- Firmware: MATEKH743
- BEC: 3.3V, 5V, 9V, 12V
- Stromsensor: Ja
- Summer: Ja
- Barometer: Ja
- Black Box: Micro SD
- Stapelgröße: Nicht stapelmontiert
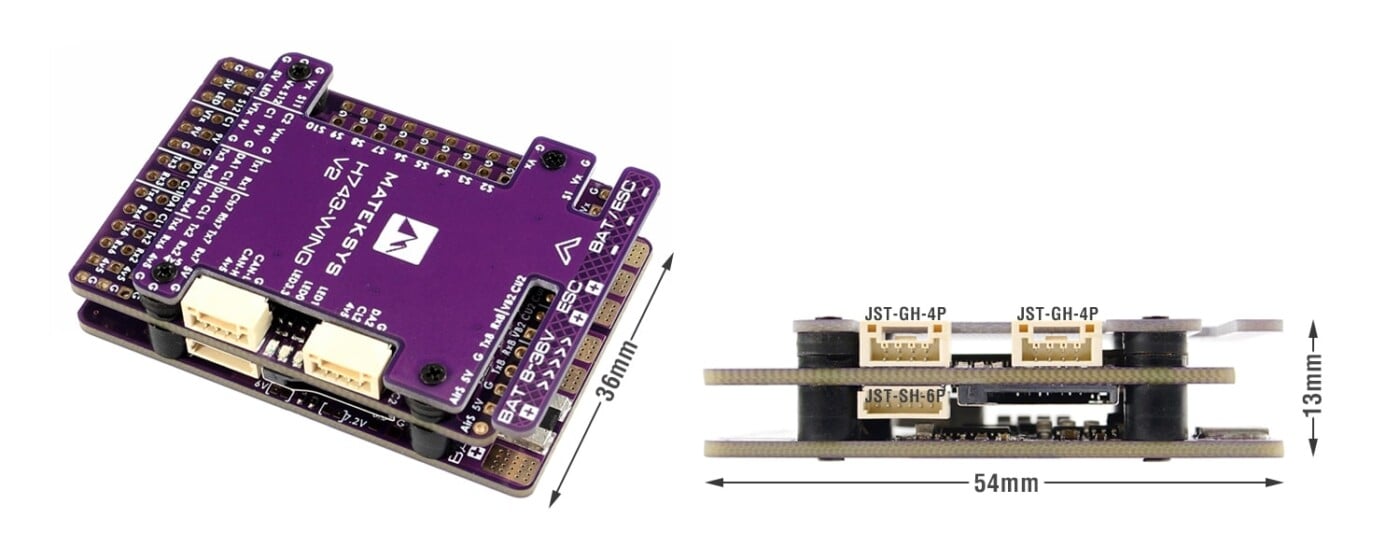
- Abmessungen: 54x36x13mm
- Gewicht: 30g
FC Firmware
- ArduPilot(ChiBiOS): MATEKH743
- INAV: MATEKH743
PDB
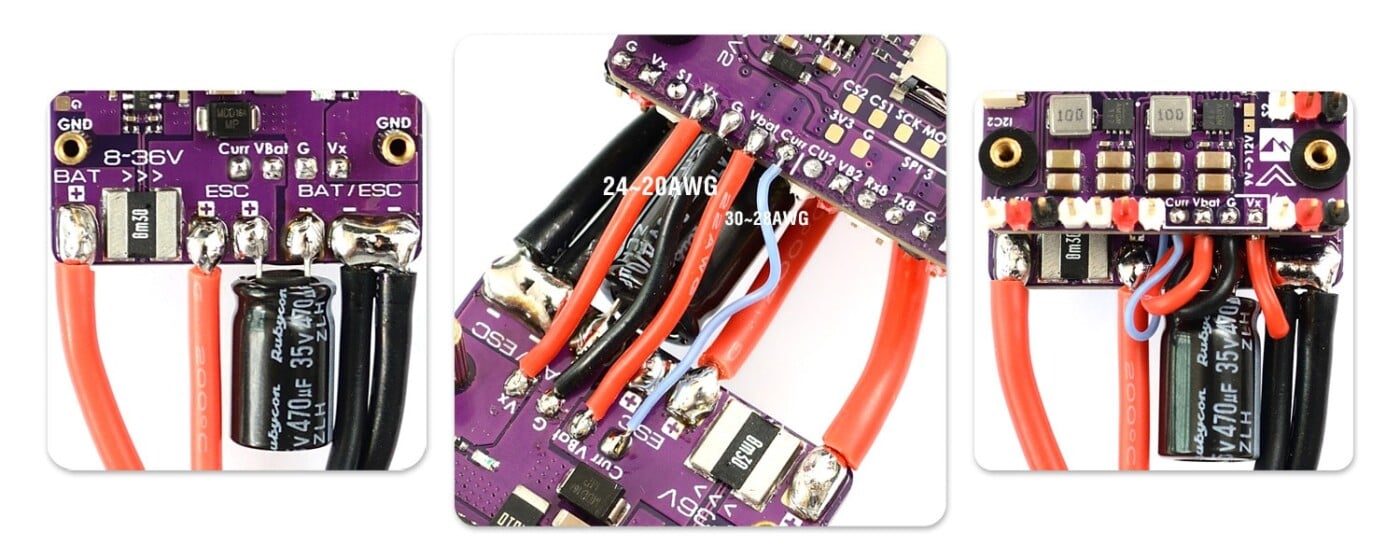
- Eingangsspannungsbereich: 8~36V (3~8S LiPo) mit TVS-Schutz
- 2x ESC-Stromanschlüsse
- Stromsensor: 220A, 3,3V ADC (Skala 150 in INAV, 66,7 A/V in ArduPilot)
- Messwiderstand: 90A Dauer, 220A Spitze.
BEC 5V Ausgang
- Entwickelt für Flugregler, Empfänger, OSD, Kamera, Summer, 2812 LED_Strip, Summer, GPS-Modul, AirSpeed
- Ausgang 5.15 +/- 0.1V DC
- Dauerstrom 2 Ampere, 3A Spitze
BEC 9V /12V Ausgang
- Entwickelt für Videosender, Kamera, Gimbal usw.
- Dauerstrom 2 Ampere, 3A Spitze
- 12V-Option mit Jumper-Pad
BEC Vx Ausgang
- Entwickelt für Servos
- Spannung einstellbar, 5V Standard, 6V oder 7.2V über Jumper
- Dauerstrom 8 Ampere, 10A Spitze
BEC 3.3V Ausgang
- Linearregler
- Dauerstrom: 200mA
Physisch
- Montage: 30,5 x 30,5mm, Φ4mm mit Ösen Φ3mm
- Abmessungen: 54 x 36 x 13 mm
- Gewicht: 30g mit USB-Verlängerung
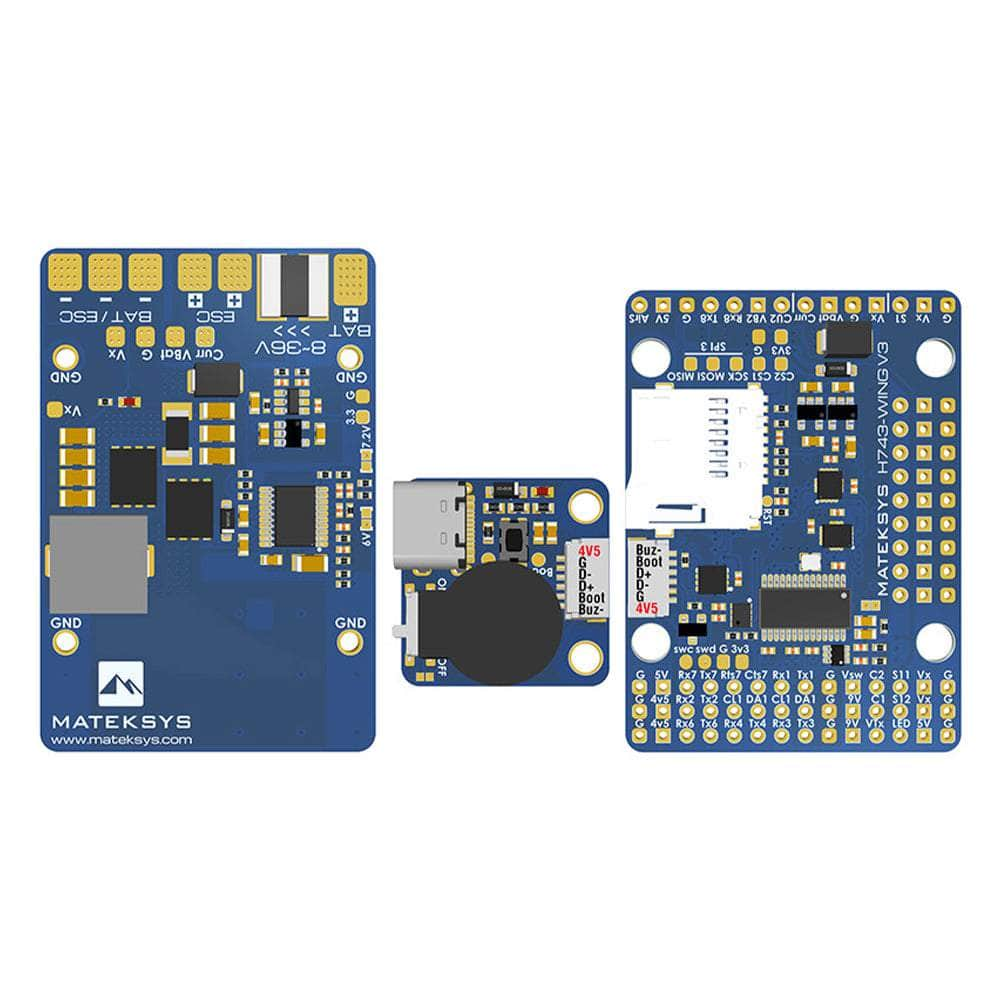
Enthalten
- 1x H743-WING
- 1x USB(Type-C)/Beep (Passiver Summer) Extender
- 1x 20cm JST-SH-6P auf JST-SH-6P Kabel für USB-Extender.
- 2x 20cm JST-GH-4P auf JST-GH-4P Kabel für CAN- & I2C-Port
- 1x Rubycon ZLH 35V 470uF Kondensator
- Dupont 2.54 Pins (Platine wird ungelötet geliefert)
Weitere Hinweise
ArduPilot
- H743-WING-V3 mit ICM42605 wird von ArduPilot 4.1 neueste oder neuer unterstützt,
- ICM42605 ist als erste IMU (IMU0) definiert, MPU6000 ist die zweite (IMU1).
- Der Stromsensorbereich beträgt 220A beim H743-WING-V2, stellen Sie sicher, dass Sie BATT_AMP_PERVLT auf 66,7 setzen
- Es wird empfohlen, STM32CubeProgrammer zu verwenden, um MCU zu löschen und Firmware hochzuladen.
- Bekanntes Problem und Lösung, H7 wird mit Ardupilot Firmware nicht initialisiert
INAV
- Der Stromsensorbereich beträgt 220A beim H743-WING-V2, stellen Sie sicher, dass Sie den Stromzähler auf 150 einstellen
- IMU ICM42605 wird von INAV3.0.2 oder höher unterstützt.
- MPU6000 ist die erste IMU (IMU0, Standard), ICM42605 ist die dritte IMU (IMU2) im INAV MATEKH743 Ziel.
-
Wenn Sie die neue ICM-4 Serie von IMUs ausprobieren möchten. laden Sie
inav_3.0.2_MATEKH743.hex
herunter
- gyro_to_use = 2 einstellen
- acc_hardware = icm42605 einstellen
- speichern
- Wenn Sie nur MPU6000 verwenden, funktioniert der H743-WING-V2 auch mit der stabilen Version 3.0.x, die vom Konfigurator heruntergeladen wurde.
- Bekanntes Problem, SD-Karte und MSC-Modus für H743 sind nicht implementiert.
Andere
- Wenn die verwendeten ESCs nicht genügend Kondensatoren integriert haben, ist ein Elektrolytkondensator mit niedrigem ESR erforderlich, um ESC-Rauschen zu reduzieren.