






Produktdetails

FC-Spezifikationen
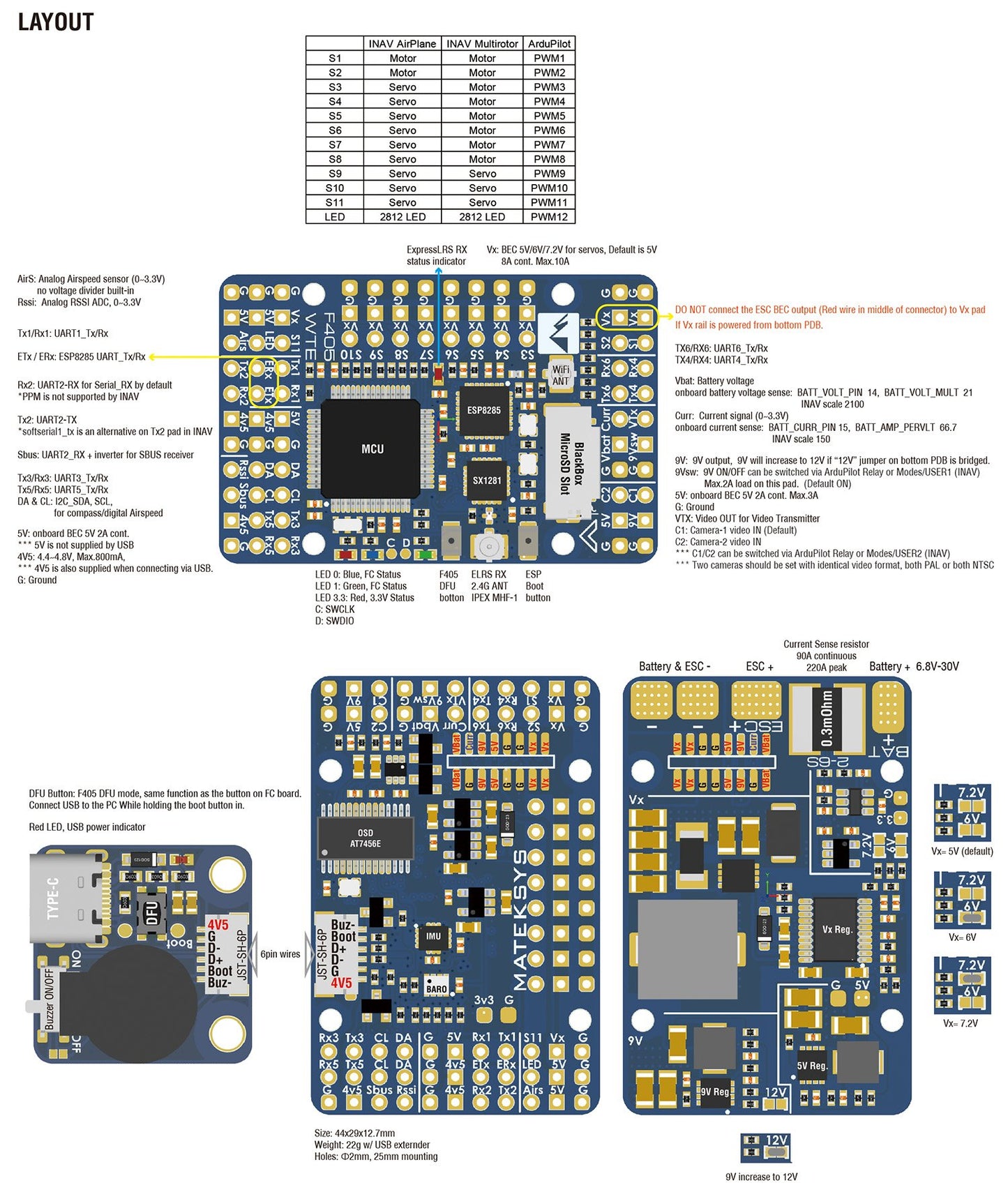
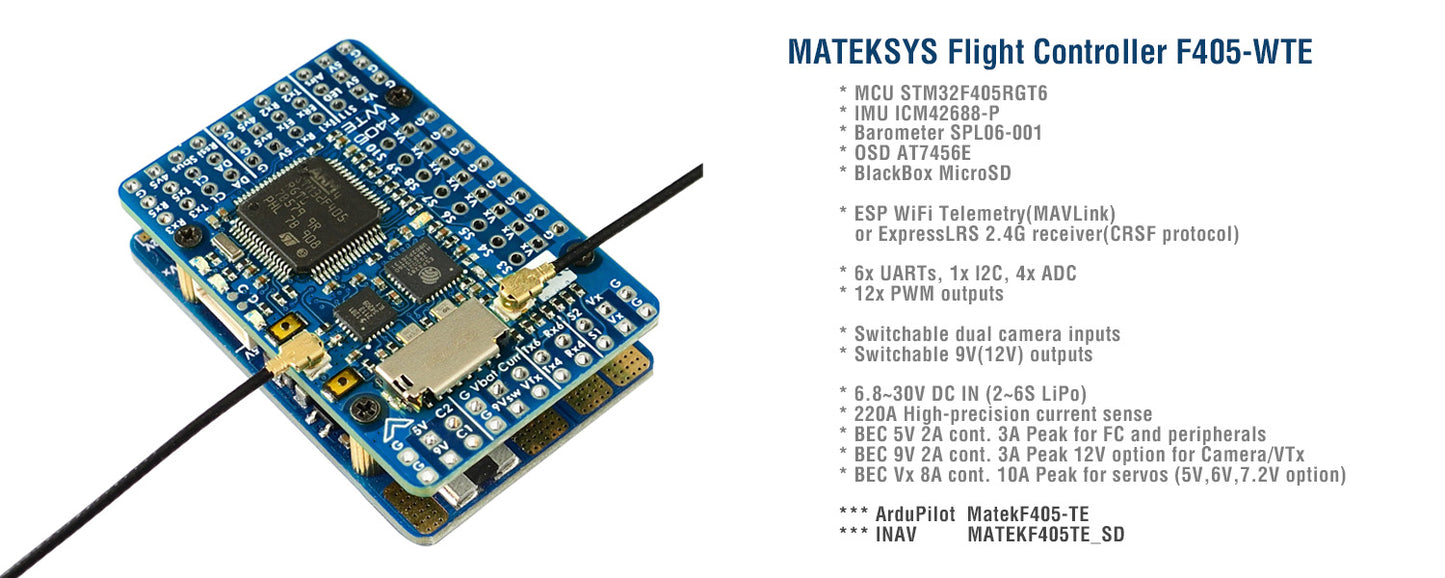
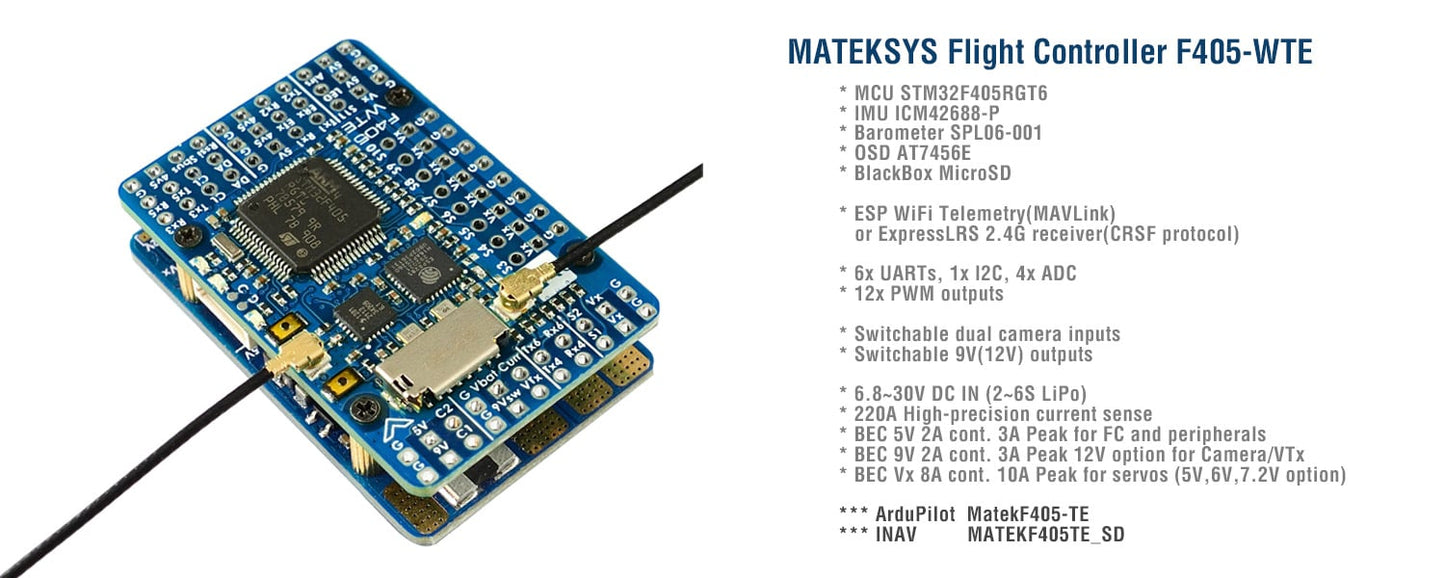
- MCU: STM32F405RGT6, 168MHz, 1MB Flash
- IMU: ICM42688-P
- Baro: SPL06-001
- OSD: AT7456E
- Blackbox: MicroSD-Kartensteckplatz
- ESP WiFi Telemetrie (MAVLink, 14dBm)
- ExpressLRS 2.4G Empfänger (CRSF Protokoll, Telemetrie 12dBm)
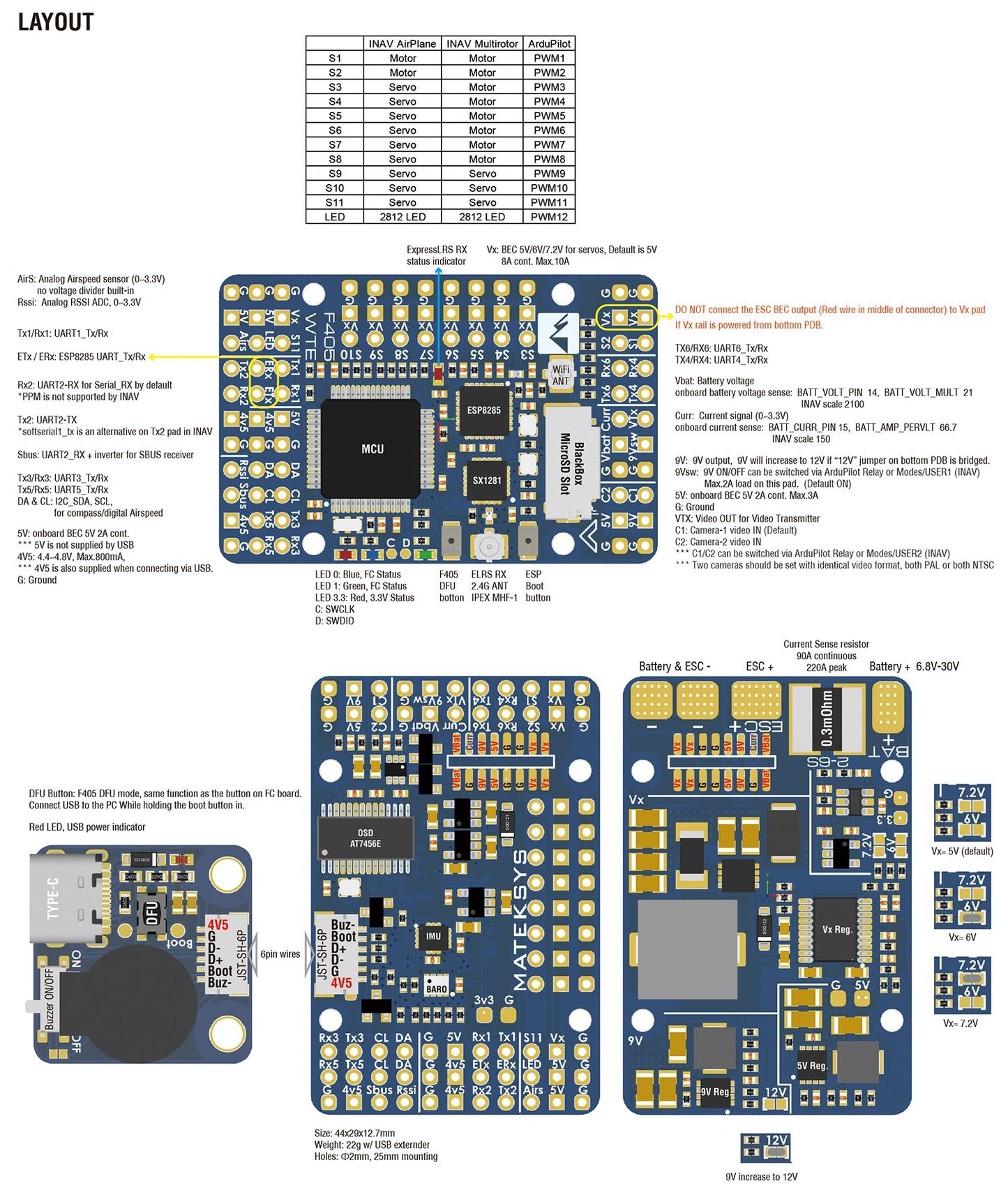
- 6x UARTs, 1x Softserial_Tx Option (INAV)
- 12x PWM-Ausgänge
- 1x I2C
- 4x ADC (VBAT, Strom, RSSI, Fluggeschwindigkeit)
- USB/Beep Extender mit Typ-C (USB2.0)
- Dual-Kamera-Eingangsschalter
- 9V (12V) für VTX-Leistungsschalter
FC-Firmware
- ArduPilot: MatekF405-TE
- INAV: MATEKF405TE_SD (nicht verfügbar in INAV Konfigurator 4.x)
PDB
- Eingangsspannungsbereich: 6,8~30V (2~6S LiPo)
- 1x ESC Power-Pads
- Batteriespannungsteiler 1K:20K (Skala 2100 in INAV, BATT_VOLT_MULT 21.0 in ArduPilot)
- Stromsensor: 220A, 3,3V ADC (Skala 150 in INAV, 66,7 A/V in ArduPilot)
- Sensorwiderstand: 90A kontinuierlich, 220A Spitze
BEC 5V Ausgang
- Entwickelt für Flugsteuerung, Empfänger, OSD, Kamera, Summer, 2812 LED_Strip, Summer, GPS-Modul, Fluggeschwindigkeit
- Dauerstrom: 2 Ampere, max. 3A
BEC 9V / 12V Ausgang
- Entwickelt für Videosender, Kamera, Gimbal usw.
- Dauerstrom: 2 Ampere, max. 3A
- 12V Option mit Jumper-Pad
- Für eine stabile 9V/12V-Ausgabe sollte die Eingangsspannung > Ausgangsspannung +1V sein
BEC Vx Ausgang
- Entwickelt für Servos
- Spannung einstellbar, 5V Standard, 6V oder 7,2V über Jumper
- Dauerstrom: 8 Ampere, max. 10A
- Für eine stabile Vx-Ausgabe sollte die Eingangsspannung > Vx-Spannung +1V sein
BEC 3.3V Ausgang
- Entwickelt für Baro-/Kompassmodul und externe 3.3V Peripheriegeräte
- Linearregler
- Dauerstrom: 200mA
Physisch
- Montage: 25 x 25mm, Φ2mm
- Abmessungen: 44 x 29 x 12.7mm
- Gewicht: 22g mit USB/Buzzer Adapter
Layout

Inbegriffen
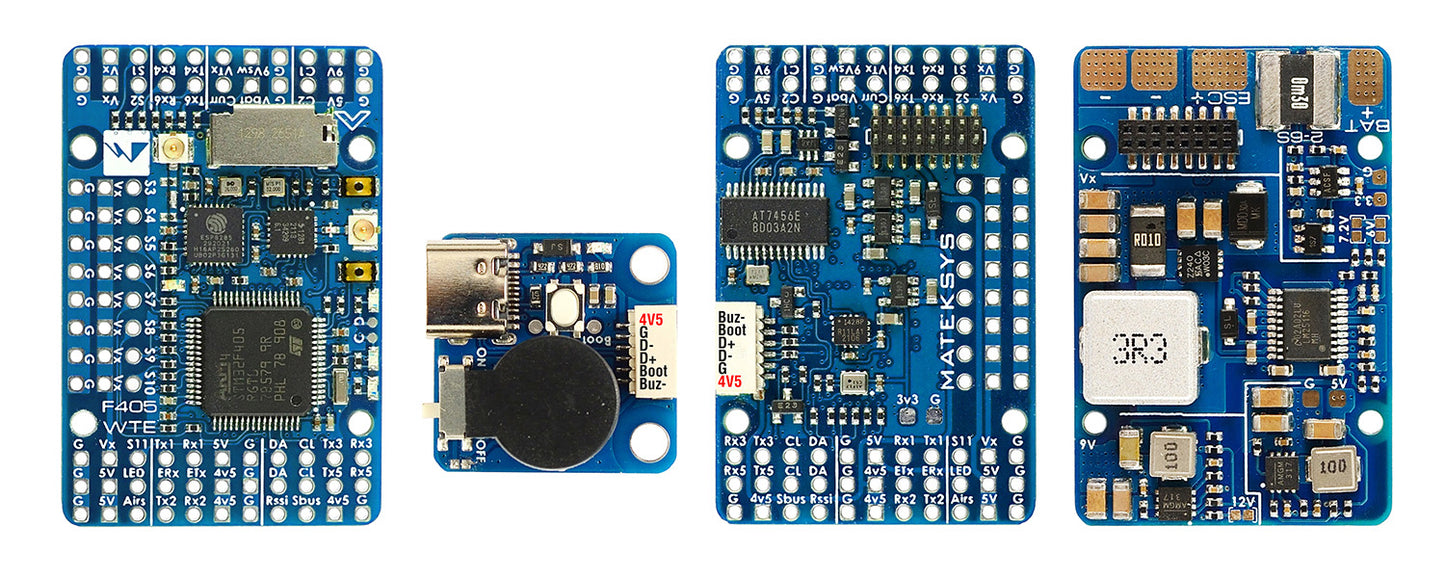
- 1x F405-WTE
- 1x USB (Typ-C)/Beep (passiver Buzzer) Extender + 20cm JST-SH-6P auf JST-SH-6P Kabel für USB Extender.
- 2x IPEX-MHF1 2.4G Antennen
- 1x Rubycon ZLH 35V 470uF Kondensator
- Dupont 2.54 Pins (Platine wird ungelötet geliefert)