





Produktdetails
Merkmale
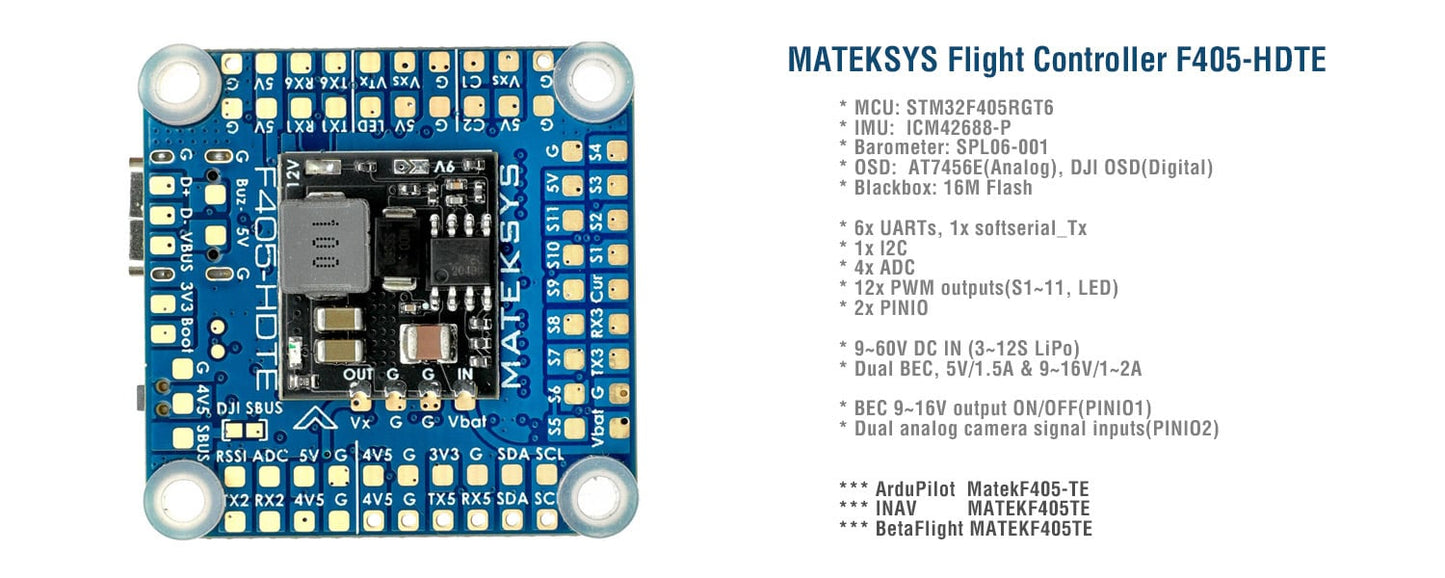
- STM32F405 verfügt über 1 MB Flash-Speicher, auf dem ArduPilot/INAV/BetaFlight ausgeführt werden kann
- InvenSense IMU der 3. Generation ICM42688-P
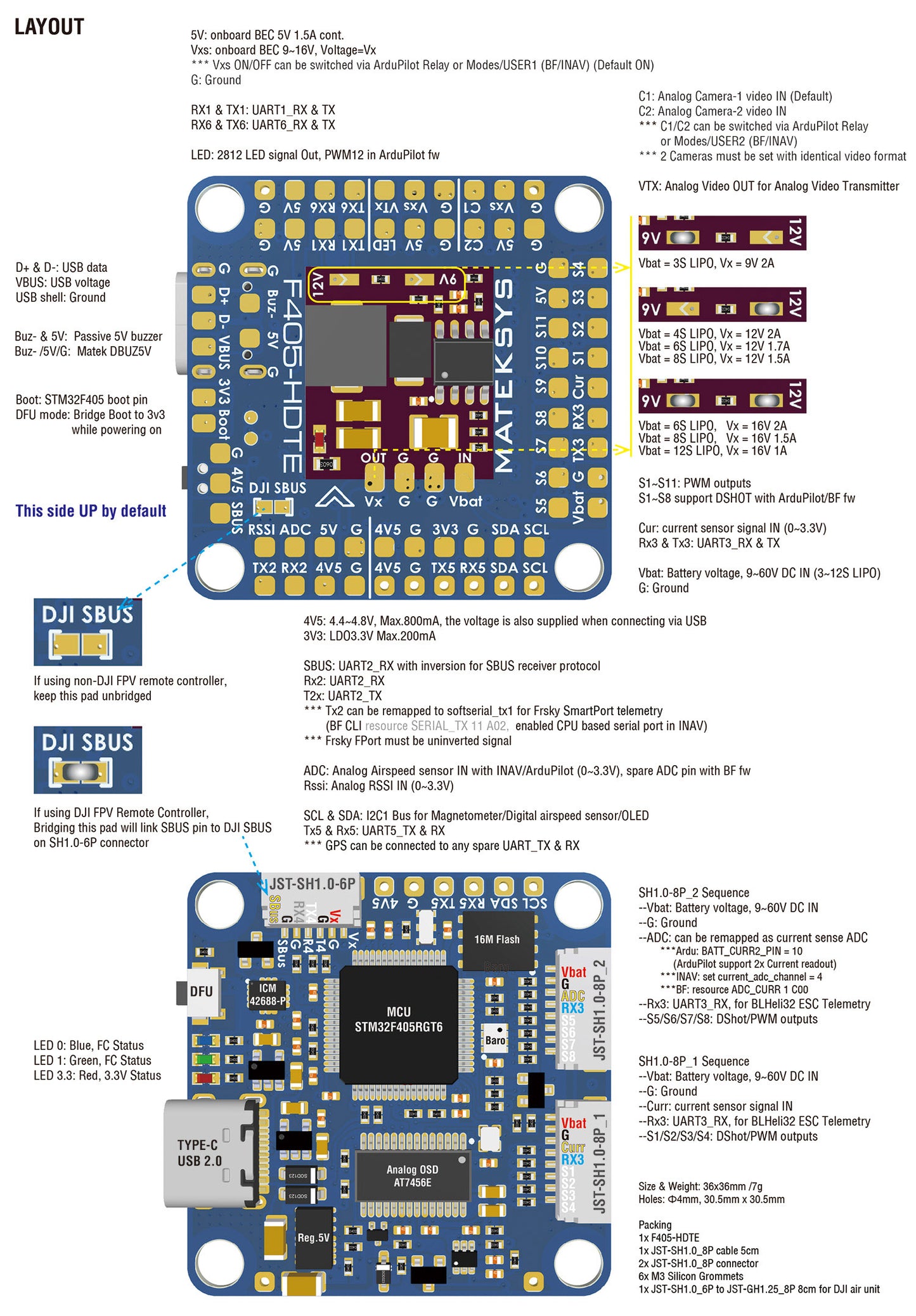
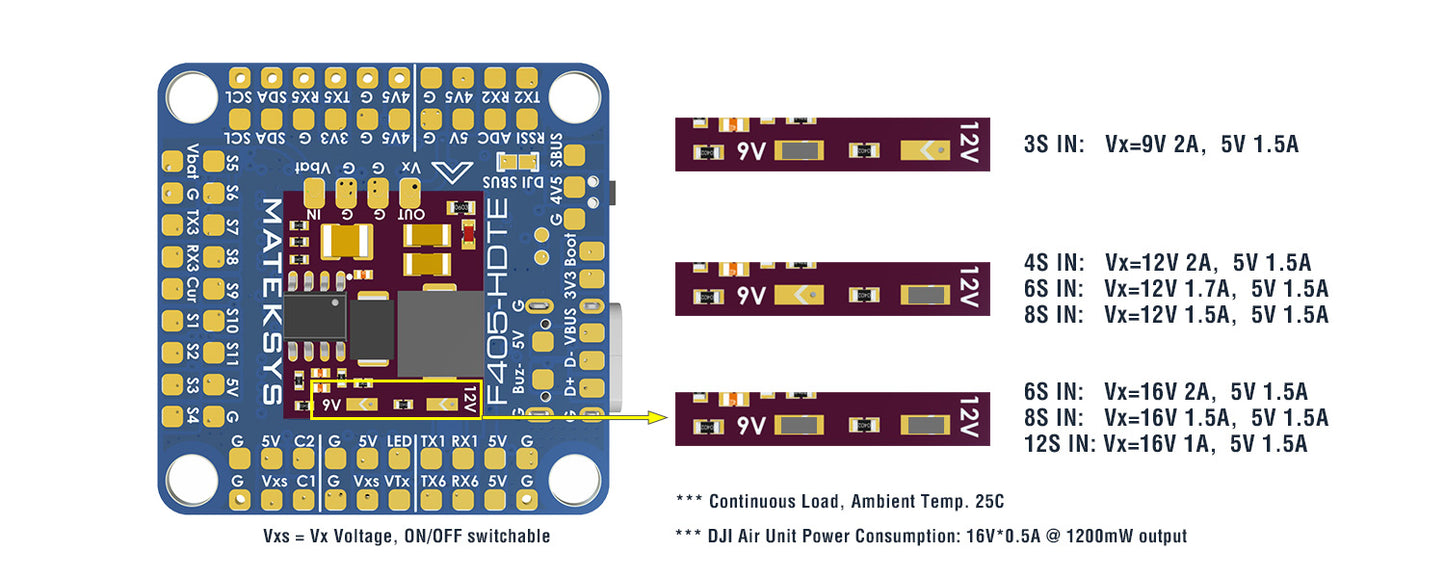
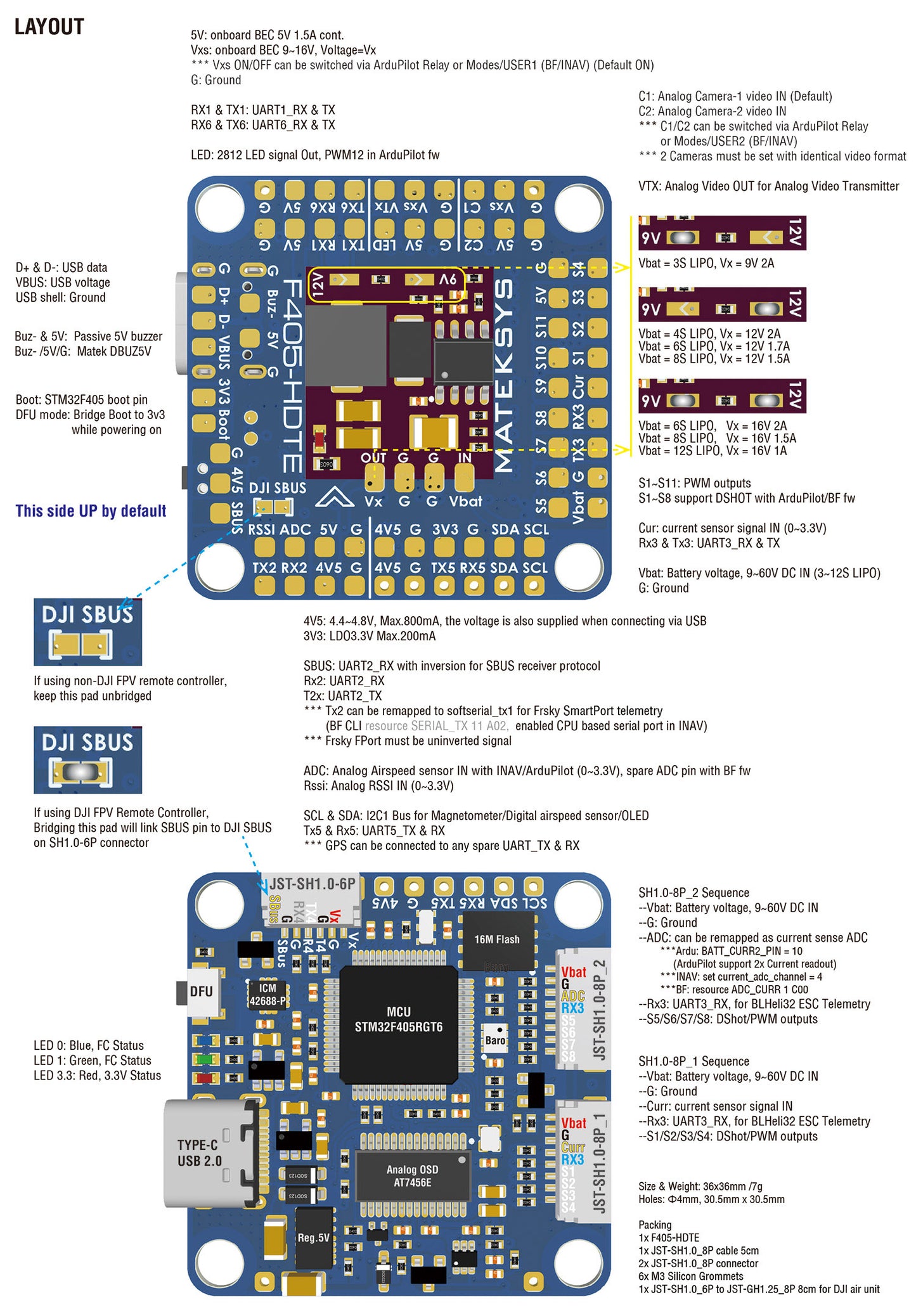
- 9-60V (3~12S LiPo) breiter Eingangsspannungsbereich und Spannungserkennung. Und ein 9~16V BEC für DJI OSD oder analoges VTX.
- 8 Motoren + 3 Servos im INAV/BF Multirotor-Mischer.
- 2x SH1.0_8pin-Anschluss für PnP mit 2x 4in1 ESC
- 1x SH1.0_6pin-Anschluss für PnP mit HD-System (Caddx Vista & Air Unit)
- USB-Pin-Ausbruch zum Anschluss an einen externen USB-Adapter.


Spezifikationen
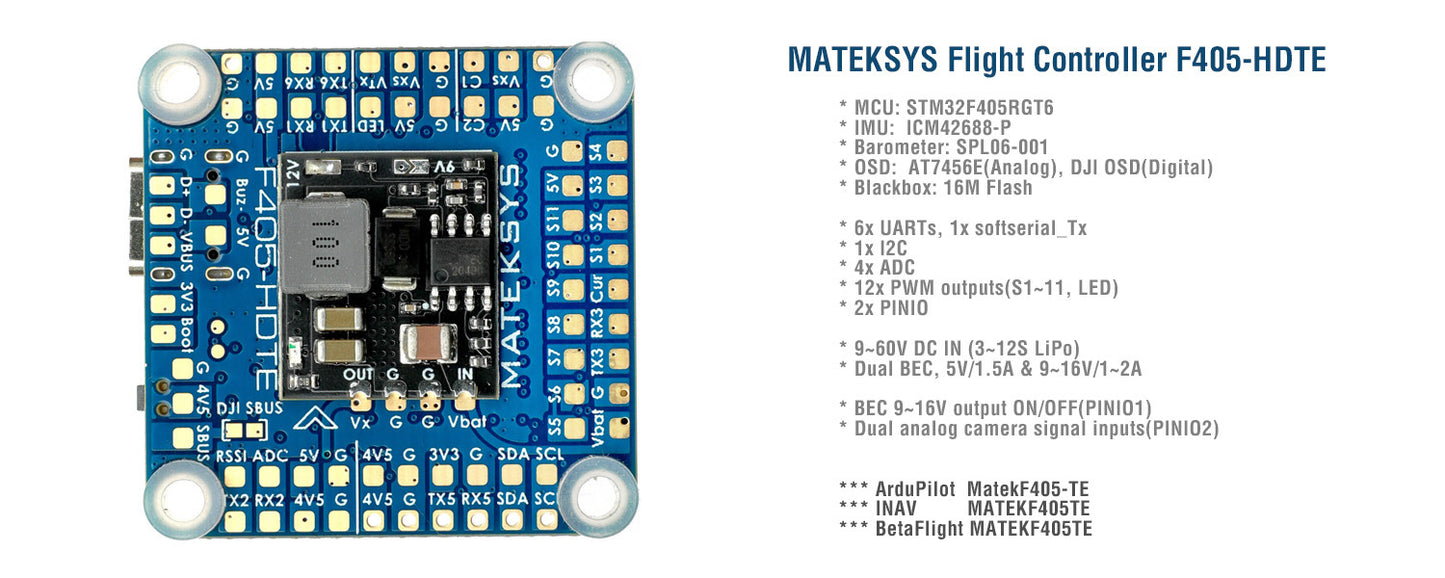
- MCU: STM32F405RGT6
- IMU: ICM42688-P
- OSD: AT7456E, DJI OSD
- Baro: SPL06-001 (I2C)
- Blackbox: 16 MB Flash-Speicher
- 6x UARTs, 1x Softserial_Tx-Option
- 12x PWM-Ausgänge (8x Dshot)
- 1x I2C
- 4x ADC (VBAT, Strom, RSSI, Airspeed)
- 2x PINIO
- 2x SH1.0_8pin-Anschluss für 4in1 ESC
- 1x SH1.0_6pin-Anschluss für HD-System (Caddx Vista & Air Unit)
- 3x LEDs für FC STATUS (Blau, Grün) und 3.3V-Anzeige (Rot)
- 9~16V(Vxs) Ausgang EIN/AUS schaltbar
- Zweifacher analoger Kamerasignal-Schalter
Leistung
- Eingang: 9~60V (3~12S LiPo)
- BEC: 5V 1,5A
- BEC: Vx, 9~16V/1~2A (3S IN/9V 2A, 4S IN/12V 2A, 6S IN/16V 2A, 8S IN/16V 1,5A, 12S IN/16V 1A)
- Batteriespannungssensor: 1K:20K (INAV Skala 2100, BF Skala 210)
- Kein eingebauter Stromsensor, unterstützt externen Stromsensor von PDB/4in1
Firmware
- ArduPilot: MatekF405-TE
- INAV: MATEKF405TE
- BetaFlight: MATEKF405TE
Physisch
- Montage: 30,5 x 30,5 mm, Φ4 mm mit Tüllen Φ3 mm
- Abmessungen: 36 x 36 x 5 mm
- Gewicht: 7g
Enthalten
- 1x FC F405-HDTE
- 6x Silikontüllen M4 auf M3
- 1x SH1.0_8pin Kabel 5cm, 2x SH1.0_8pin Steckverbinder
- 1x SH1.0_6pin auf GH1.25_8pin Kabel 8cm für HD-System (Caddx Vista & Air Unit)