












Produktdetails
Entfesseln Sie das volle Potenzial Ihrer Drohne mit dem CAN-G474 Adapterknoten
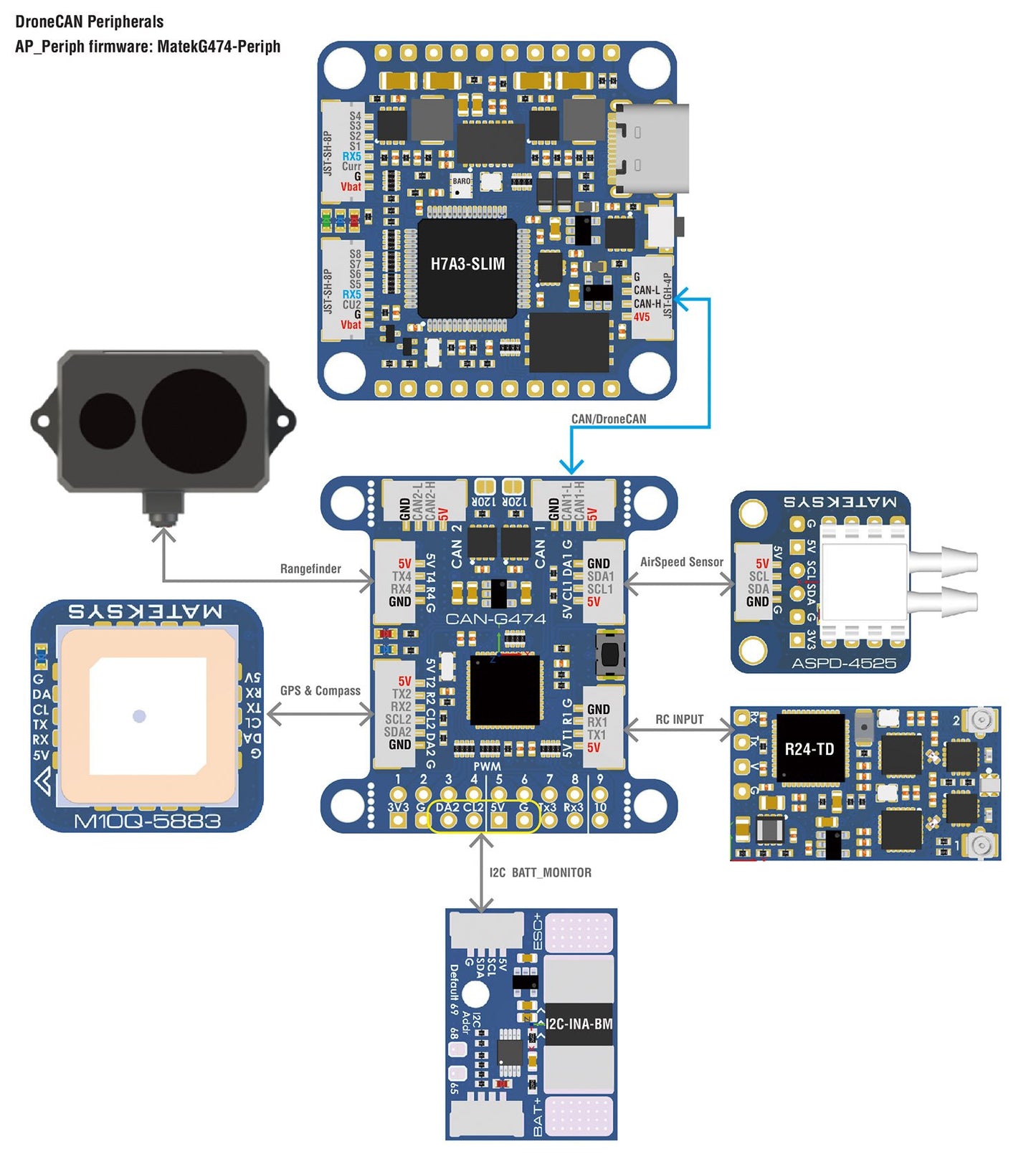
Wir stellen den CAN-G474 vor, den ultimativen Adapterknoten für Enthusiasten und Profis im Bereich der unbemannten Technologie. Ausgestattet mit der hochmodernen ArduPilot AP_Periph Firmware ist diese Platine ein robustes Fundament für den Bau oder die Aufrüstung der Funktionalität Ihrer Drohne.
Technisches Meisterwerk für verbesserte Drohnenoperationen
Im Herzen des CAN-G474 liegt der leistungsstarke STM32G474CE Mikrocontroller, ausgestattet mit 512 KB Flash-Speicher, der eine schnelle und zuverlässige Verarbeitungsleistung gewährleistet. Dieser Adapterknoten ist nicht nur intelligent, sondern auch schnell. Mit einem CAN-Transceiver, der Datenraten von bis zu 5 Mbit/s und die Unterstützung von CANFD bietet, ist eine Hochgeschwindigkeitskommunikation innerhalb Ihres UAV-Systems ein Kinderspiel.
Vielseitige Konnektivität für umfassende Steuerung
Tauchen Sie ein in eine Welt der Konnektivitätsoptionen mit dem CAN-G474:
- Dual CAN-Bus-System: Verwalten Sie komplexe Setups mit Leichtigkeit.
- Vier UARTs & Zwei I2C-Busse: Schließen Sie eine Vielzahl von Peripheriegeräten an, darunter GNSS, Entfernungsmesser und mehr.
- Einzelne SPI-Schnittstelle: Speziell für Peripheriegeräte wie den RM3100 entwickelt, mit dedizierten SPI-Pads auf der Unterseite für ein sauberes, effizientes Setup.
- Elf PWM-Ausgänge: Ob Servos oder ESCs, alle PWMs unterstützen DMA/DShot für präzise Steuerung.
Optimiert für ArduPilot Software
Nutzen Sie die ArduPilot-Treiberbibliothek nahtlos. Der CAN-G474 wandelt unterstützte Peripheriegeräte – von GNSS und Kompassen bis hin zu elektronischen Kraftstoffeinspritzern – in DroneCAN-Bus-Peripheriegeräte um. Dies macht die Integration mehrerer Geräte in Ihr Drohnen-Ökosystem so einfach wie Plug-and-Play.
Robust gebaut für unerbittliche Leistung
Der CAN-G474 wurde entwickelt, um in den anspruchsvollsten Umgebungen zu funktionieren und arbeitet in einem Temperaturbereich von -30 bis 85 °C. Er ist nicht nur robust, sondern auch kompakt und leicht, was ihn zu einer idealen Wahl für jeden Drohnenbau macht.
Abmessungen und Montage:
- Platinengröße: 36mm x 36mm x 6mm
- Gewicht: 5,2 Gramm
- Standardmontage: 30,5 mm quadratisch mit M3-Befestigungslöchern
Im Lieferumfang:
- 1x CAN-G474 Platine
- 2x JST-GH-4P 20cm Silikonkabel
- 1x JST-GH-6P 20cm Silikonkabel
Firmware-Flexibilität
- Vorinstalliert mit ArduPilot Firmware: Wählen Sie zwischen MatekG474-Periph für Peripheriesensoren und MatekG474-DShot für PWM-Ausgänge.
- Einfach zu aktualisieren: Verwenden Sie das DroneCAN GUI Tool oder Mission Planner für Firmware-Updates, oder den STM32CubeProgrammer für Updates im DFU-Modus.
Einfaches, aber ausgeklügeltes Anzeigesystem:
- Blaue LED: Zeigt den Boot- und Kommunikationsstatus an.
- Rote LED: Dient als 3,3V-Stromanzeige.
Egal, ob Sie ein Bastler sind, der Ihre Drohne verbessern möchte, oder ein Profi, der fortschrittliche Sensoren und Peripheriegeräte integriert, der CAN-G474 Adapterknoten bietet die Vielseitigkeit, Leistung und Zuverlässigkeit, um Ihre unbemannten Technologielösungen zu verbessern.


Vollständige Spezifikationen
- CAN-G474 ist ein Adapterknoten, der auf der ArudPilot AP_Periph Firmware basiert.
- mit 5Mbit/s CAN-Transceiver und STM32G474 MCU ist CAN-G474 CANFD-fähig.
- Mit dieser Platine können Sie die ArduPilot-Treiberbibliothek einfach nutzen, um von ArduPilot unterstützte GNSS, Kompass, Barometer, Airspeed-Sensor, Entfernungsmesser, Näherungssensor, elektronische Kraftstoffeinspritzdüsen und GPIO-basierte (PWM, LED-Benachrichtigung) Peripheriegeräte in DroneCAN-Bus-Peripheriegeräte umzuwandeln.
- MCU: STM32G474CE, 512KB Flash
- CAN-Transceiver Datenraten bis zu 5Mbit/s
- 2x CAN-Bus
-
4x UARTs
- für Peripherie GNSS, Entfernungsmesser, Näherung, EFI, RC-Eingang (Empfänger)
- unterstützt GNSS, Kompass, Barometer-Sensoren über MSP-Protokoll. MSP ist standardmäßig auf TX3 aktiviert.
-
2x I2C-Bus
- für Peripherie I2C Airspeed-Sensor, Barometer, Kompass
-
1x SPI
- für Peripherie RM3100
- SPI-Pads für RM3100 befinden sich auf der Unterseite, mit "CS, MOSI, MISO, SCK" Siebdruck
-
11x PWM-Ausgänge
- für Servos und ESC, alle PWMs unterstützen DMA/DShot
- PWM1-10 auf DuPont 2,54 mm Löchern
- PWM11-Pad befindet sich auf der Unterseite, mit "11" Siebdruck
- ST Debug, SWC & SWD (auf der Unterseite)
- UART1 (TX1, RX1) unterstützt Firmware-Update im DFU-Modus
-
LED
- Blau, schnelles Blinken, Booten
- Blau, langsames Blinken, Kommunikation mit Flugcontroller
- Rot, 3.3V Anzeige
- Eingangsspannungsbereich: 4,5~5,5V @5V Pad/Pin
- Stromverbrauch: 62mA
- Betriebstemperaturen: -30~85 °C
Physisch
- 5x JST-GH-4P(SM04B-GHS-TB) für CAN1, CAN2, I2C1, UART1 und UART4
- 1x JST-GH-6P(SM06B-GHS-TB) für UART3+I2C2
- 18x DuPont 2,54mm Löcher
- Platinengröße: 36mm*36mm*6mm. 5,2g,
- Montage: 30,5mm 4x Dia.3mm
- 3D-Datei: CAN-G474_STEP.zip
Verpackung
- 1x CAN-G474 Platine
- 2x JST-GH-4P auf JST-GH-4P 20cm Silikonkabel
- 1x JST-GH-6P auf JST-GH-6P 20cm Silikonkabel
Firmware
- ArduPilot AP_Periph MatekG474-Periph für Peripheriesensoren
- ArduPilot AP_Periph MatekG474-DShot für DroneCAN-PWM-Ausgang
- Update über DroneCAN GUI Tool oder Mission Planner-DroneCAN Tab, laden Sie " AP_Periph.bin "
- Update über STM32CubeProgrammer im DFU-Modus, verbinden Sie das USB-TTL-Modul mit UART1, stecken Sie USB ein, während Sie die DFU-Taste gedrückt halten, laden Sie " AP_Periph_with_bl.hex ".
Hinweis
- Es muss nur ein CAN-Bus mit dem Flugcontroller verbunden werden, oder beide mit dem FC zur Redundanz.
- SWC/SWD teilen sich MCU-Pins mit SDA1/SCL1
- Andere nicht spezifizierte MCU-Pins sind derzeit nutzlos.
- CAN-G474 unterstützt 1Mbit ~ 5Mbit CAN/CANFD, CAN-L431 arbeitet mit 1Mbit CAN.