










Produktdetails
Kotleta 20 ist ein fortschrittlicher Can-Bus-Controller für sensorlose BLDC-Motoren, der für autonome Anwendungen entwickelt wurde, die das
UAVcan-Protokoll
wie Pixhawk- und PX4-Systeme verwenden.
Zu seinen primären Anwendungsbereichen gehören Antriebssysteme von elektrischen unbemannten Luft- und Wasserfahrzeugen. Der Kotleta 20 ESC läuft mit
Sapog
– einer Open-Source-Multiplattform-BLDC-Controller-Firmware, die von Zubax Robotics entwickelt wurde.

Merkmale
- Hervorragende dynamische Eigenschaften.
- Rekuperatives Bremsen und aktives Freilaufen.
- 500 W Dauerleistung bei 8,8 g Gewicht.
- Optionale Drehzahlregelung (RPM-Regler).
- Selbstdiagnose und Meldung des Gesundheitszustands.
- Hochgradig konfigurierbar.
- Geringes Rauschen und geringe Stromwelligkeit dank der eingebetteten Low-ESR-Filterkondensatoren und hochfrequenten PWM.
-
Unterstützte Schnittstellen:
- CAN (ISO 11898-2)
- UART.
- RCPWM (analoge PWM-Schnittstelle, die in der Robotik weit verbreitet ist).
- Hohe Qualitätssicherung:
- Schutz vor unlizenzierter (gefälschter) Produktion durch eine auf jeder gefertigten Einheit installierte digitale Signatur.
- Open-Source-Firmware - Sapog (3-Klausel-BSD-Lizenz).
Ressourcen
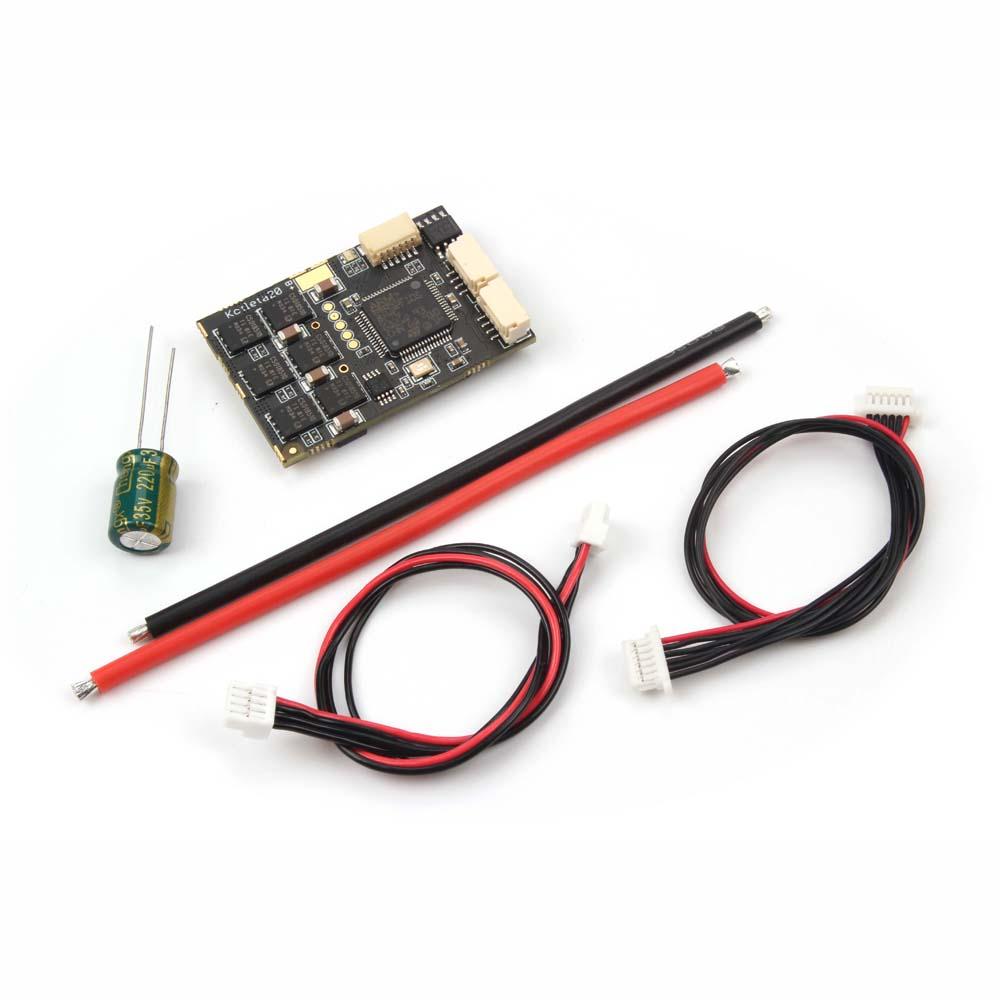
Kit-Inhalt (einzelner ESC)
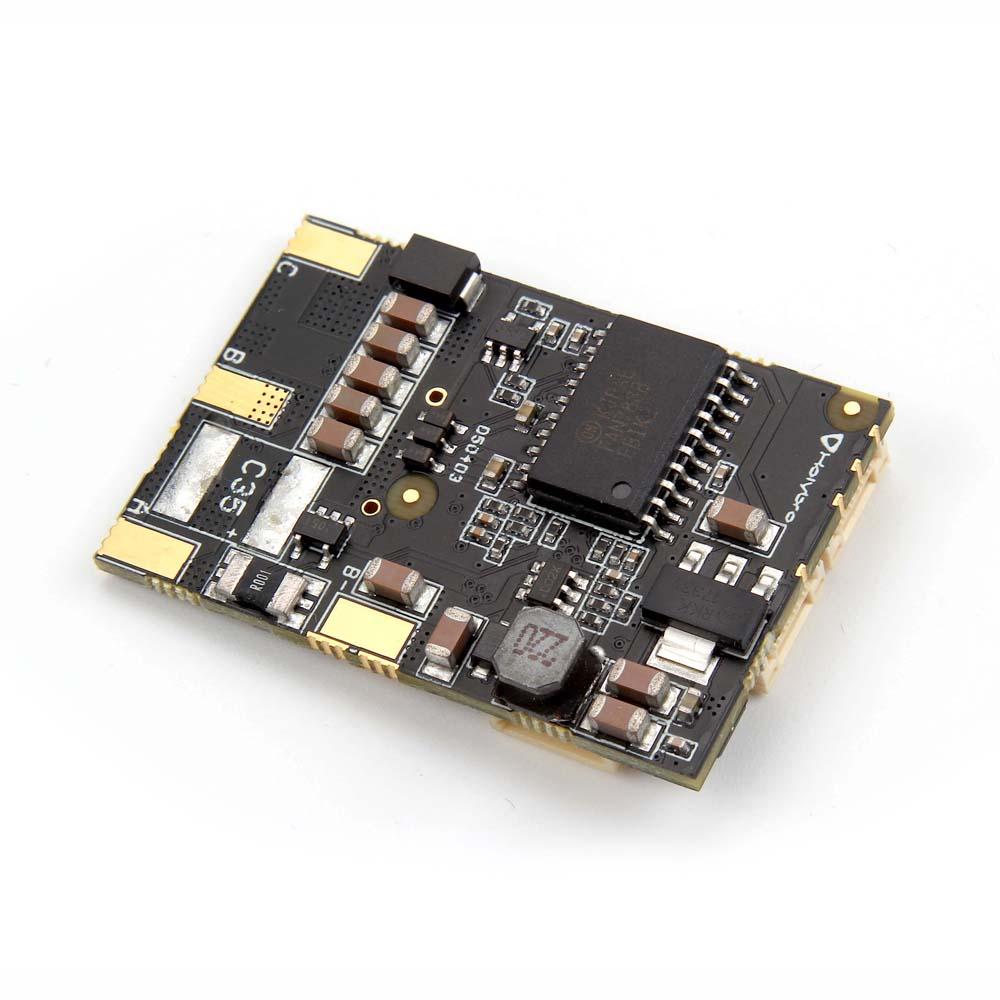
- 1 x Kotleta 20 ESC (Combo)
- 1 x 100 mm lange 16 AWG-Kabel (Rot)
- 1 x 100 mm lange 16 AWG-Kabel (Schwarz)
- 1 x Elektrolytkondensator: 220uF 35V
- 1 x 4- auf 4-poliges Kabel (CAN)
- 1 x 6- auf 6-poliges Kabel (Debug)
- 1 x Mikro-Abschlussstecker
Kit-Inhalt (4er-Pack)
- 4 x Kotleta 20 ESC (Combo)
- 4 x 100 mm lange 16 AWG-Kabel (Rot)
- 4 x 100 mm lange 16 AWG-Kabel (Schwarz)
- 4 x Elektrolytkondensator: 220uF 35V
- 4 x 4- auf 4-poliges Kabel (CAN)
- 1 x 6- auf 6-poliges Kabel (Debug)
- 1 x Mikro-Abschlussstecker