































Produktdetails
Im Inneren des Pixhawk® 6X befindet sich ein STMicroelectronics®-basierter STM32H753, gepaart mit Sensortechnologie von Bosch® und InvenSense®, der Ihnen Flexibilität und Zuverlässigkeit für die Steuerung jedes autonomen Fahrzeugs bietet, geeignet für akademische und kommerzielle Anwendungen.
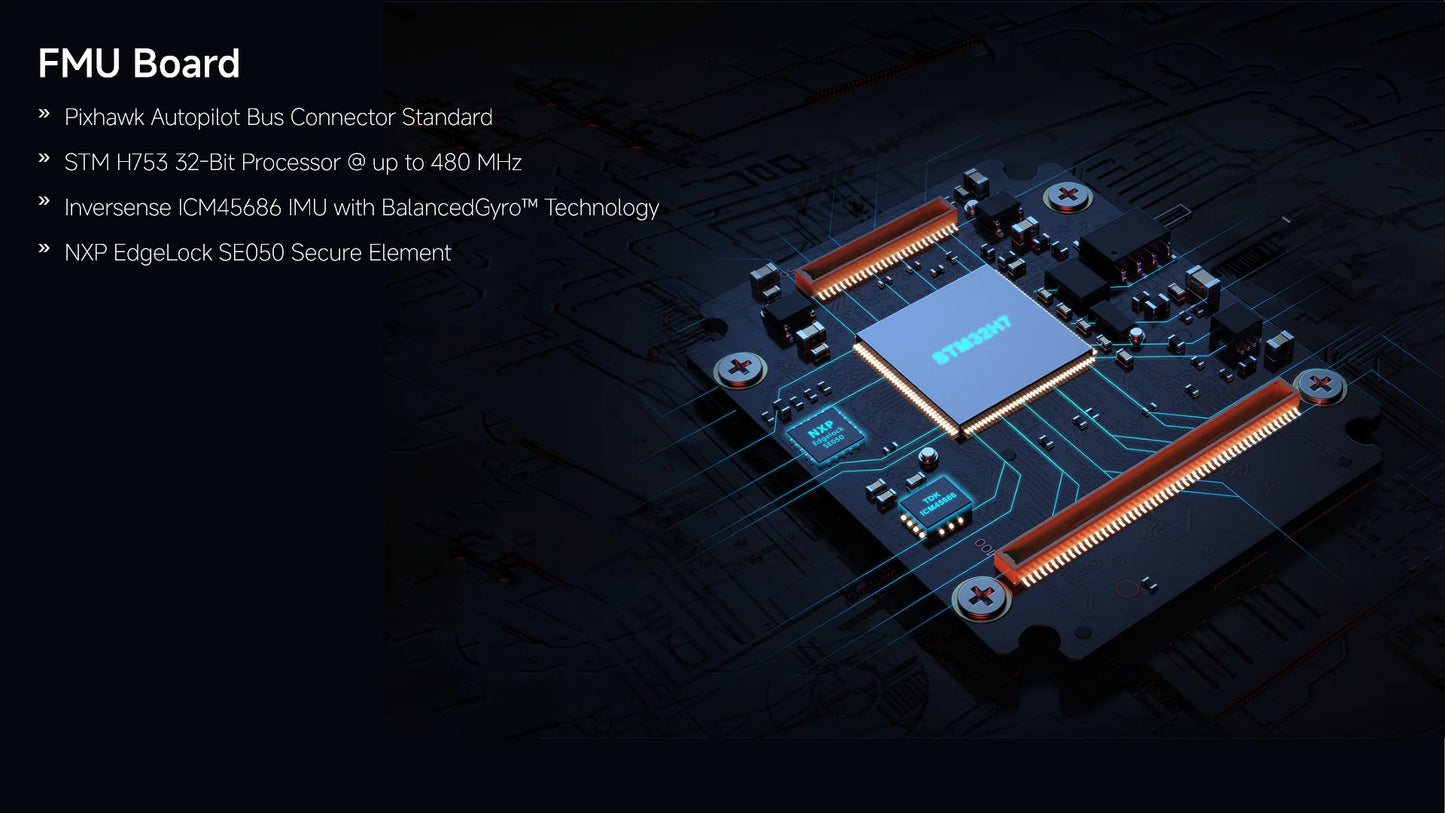
Der H7-Mikrocontroller des Pixhawk® 6X enthält den Arm® Cortex®-M7-Kern, der mit bis zu 480 MHz läuft, verfügt über 2 MB Flash-Speicher und 1 MB RAM. Der PX4 Autopilot nutzt die erhöhte Leistung und den RAM. Dank der aktualisierten Verarbeitungsleistung können Entwickler produktiver und effizienter bei ihrer Entwicklungsarbeit sein, was komplexe Algorithmen und Modelle ermöglicht.
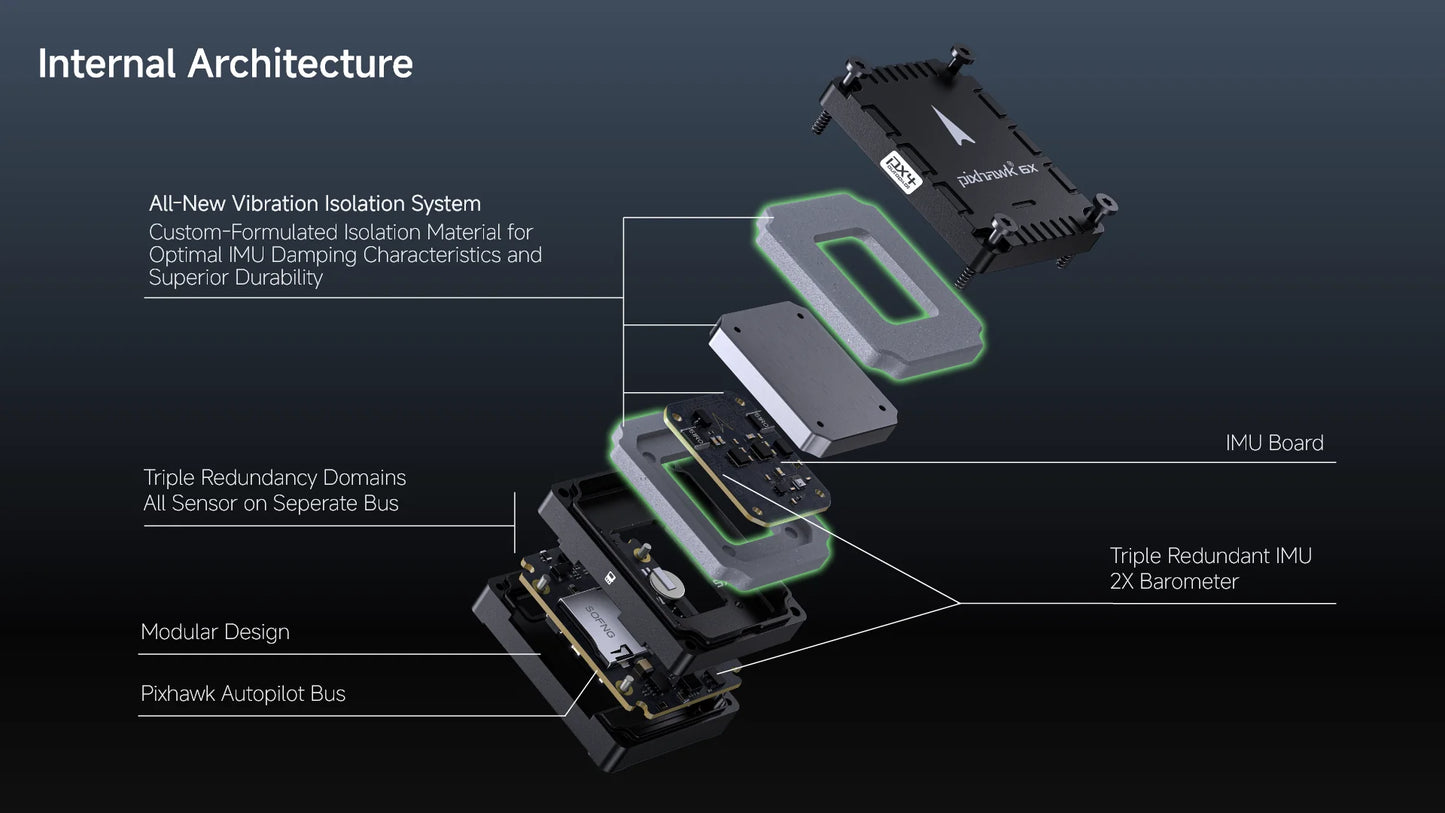
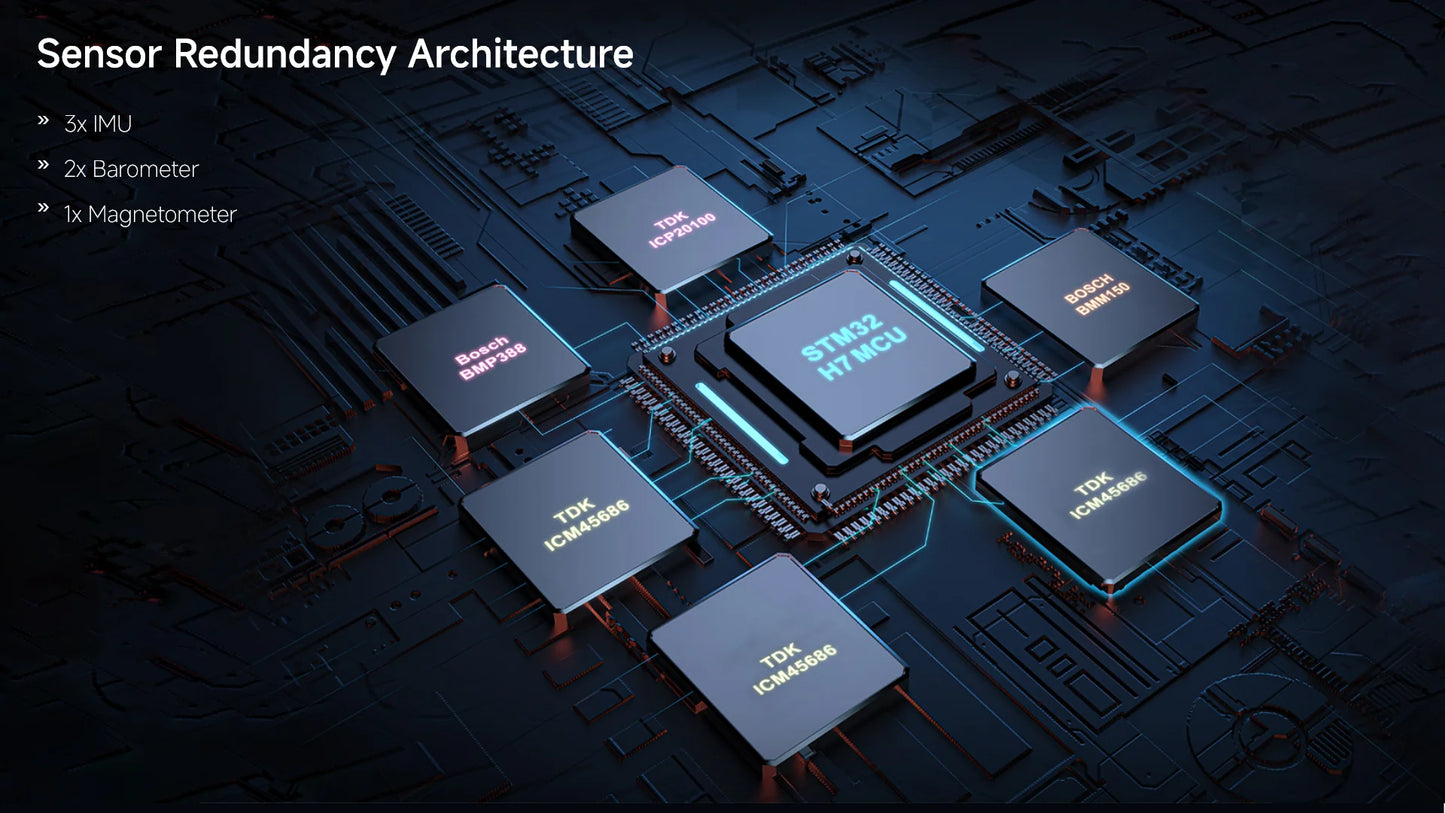
Der offene Standard FMUv6X enthält leistungsstarke, rauscharme IMUs an Bord, die für eine bessere Stabilisierung entwickelt wurden. Dreifach redundante IMU & doppelt redundantes Barometer auf separaten Bussen. Wenn der PX4 Autopilot einen Sensorfehler erkennt, schaltet das System nahtlos auf einen anderen um, um die Zuverlässigkeit der Flugsteuerung zu gewährleisten.
Ein unabhängiger LDO versorgt jeden Sensorsatz mit unabhängiger Leistungsregelung. Ein Vibrationsisolationssystem filtert hochfrequente Vibrationen heraus und reduziert Rauschen, um genaue Messwerte zu gewährleisten, wodurch Fahrzeuge insgesamt bessere Flugleistungen erzielen können.
Der externe Sensorbus (SPI5) verfügt über zwei Chip-Select-Leitungen und Daten-Ready-Signale für zusätzliche Sensoren und Nutzlasten mit SPI-Schnittstelle, und mit einem integrierten Microchip Ethernet PHY ist jetzt eine Hochgeschwindigkeitskommunikation mit Missionscomputern über Ethernet möglich.
Der Pixhawk® 6X ist perfekt für Entwickler in Unternehmensforschungslabors, Start-ups, Akademikern (Forschung, Professoren, Studenten) und kommerziellen Anwendungen.







Die Rev 8 Version wird in der PX4 1.14.3 Version oder höher, sowie in der stabilen Ardupilot 4.5.0 Version oder höher unterstützt. Sie wird standardmäßig mit PX4-Firmware ausgeliefert. Der Benutzer kann auch Ardupilot-Firmware verwenden, indem er die Firmware über Mission Planner oder QGroundControl flasht.
Eigenschaften
- Leistungsstarker STM32H753 Prozessor
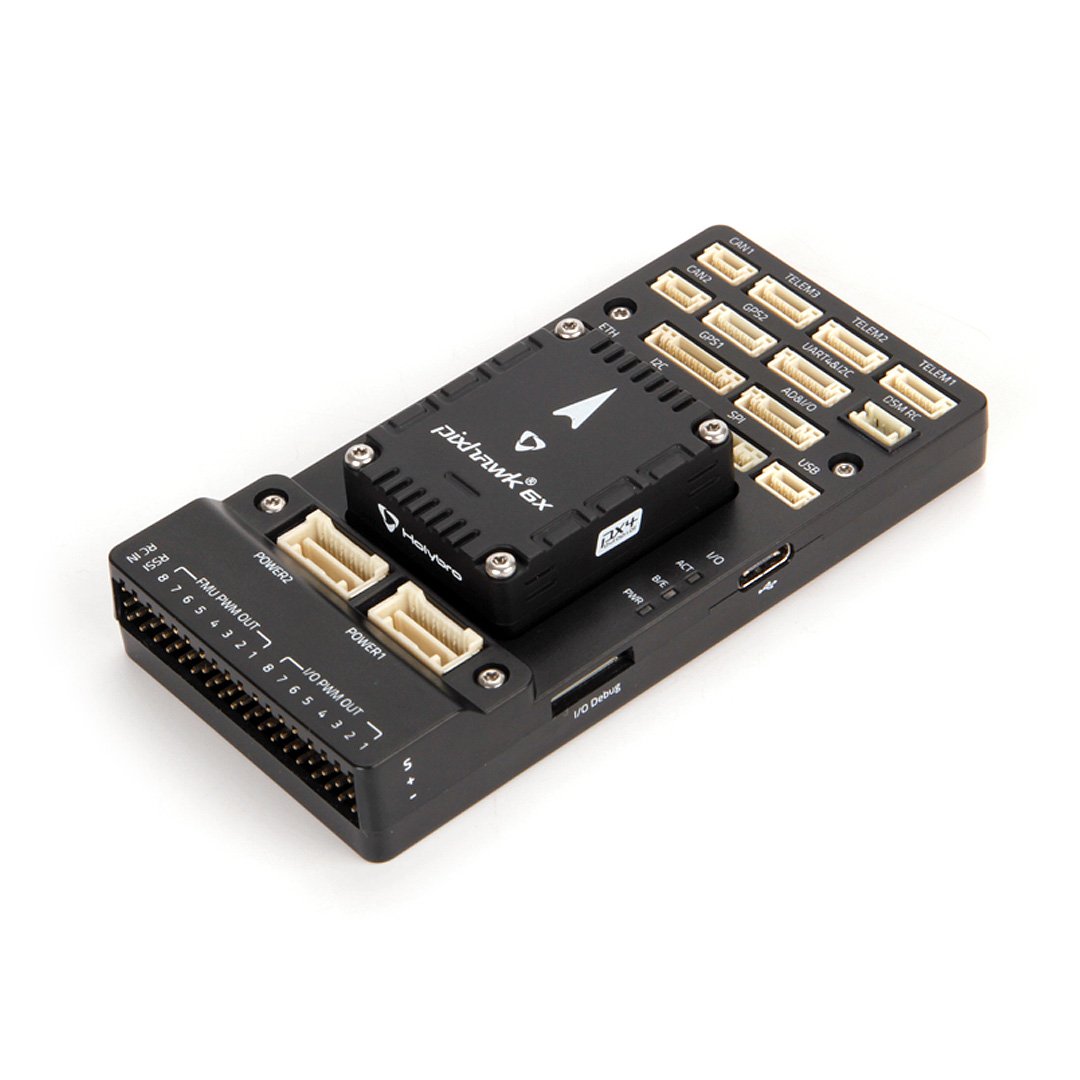
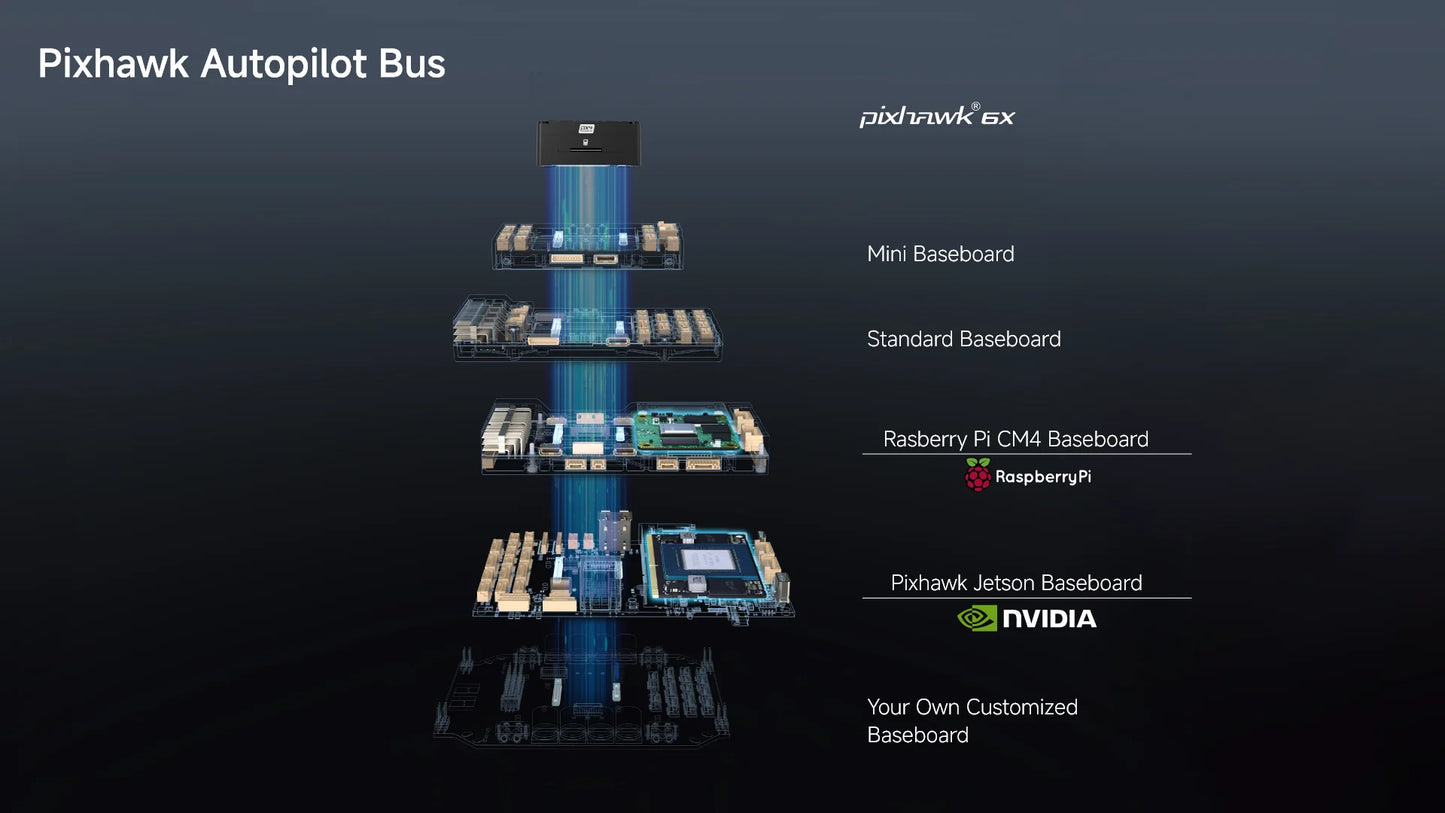
- Modularer Flugcontroller: separate IMU, FMU und Basissystem, verbunden durch einen 100-Pin- & 50-Pin-Pixhawk® Autopilot-Busanschluss.
- Redundanz: 3x IMU-Sensoren & 2x Barometersensoren auf separaten Bussen
- Dreifach redundante Domänen: Völlig isolierte Sensordomänen mit separaten Bussen und separater Leistungsregelung
- Neu entwickeltes Vibrationsisolationssystem zur Filterung hochfrequenter Vibrationen und zur Reduzierung von Rauschen, um genaue Messwerte zu gewährleisten
- Ethernet-Schnittstelle für Hochgeschwindigkeitsintegration von Missionscomputern
- IMUs sind durch Bord-Heizwiderstände temperaturgeregelt, was eine optimale Betriebstemperatur der IMUs ermöglicht
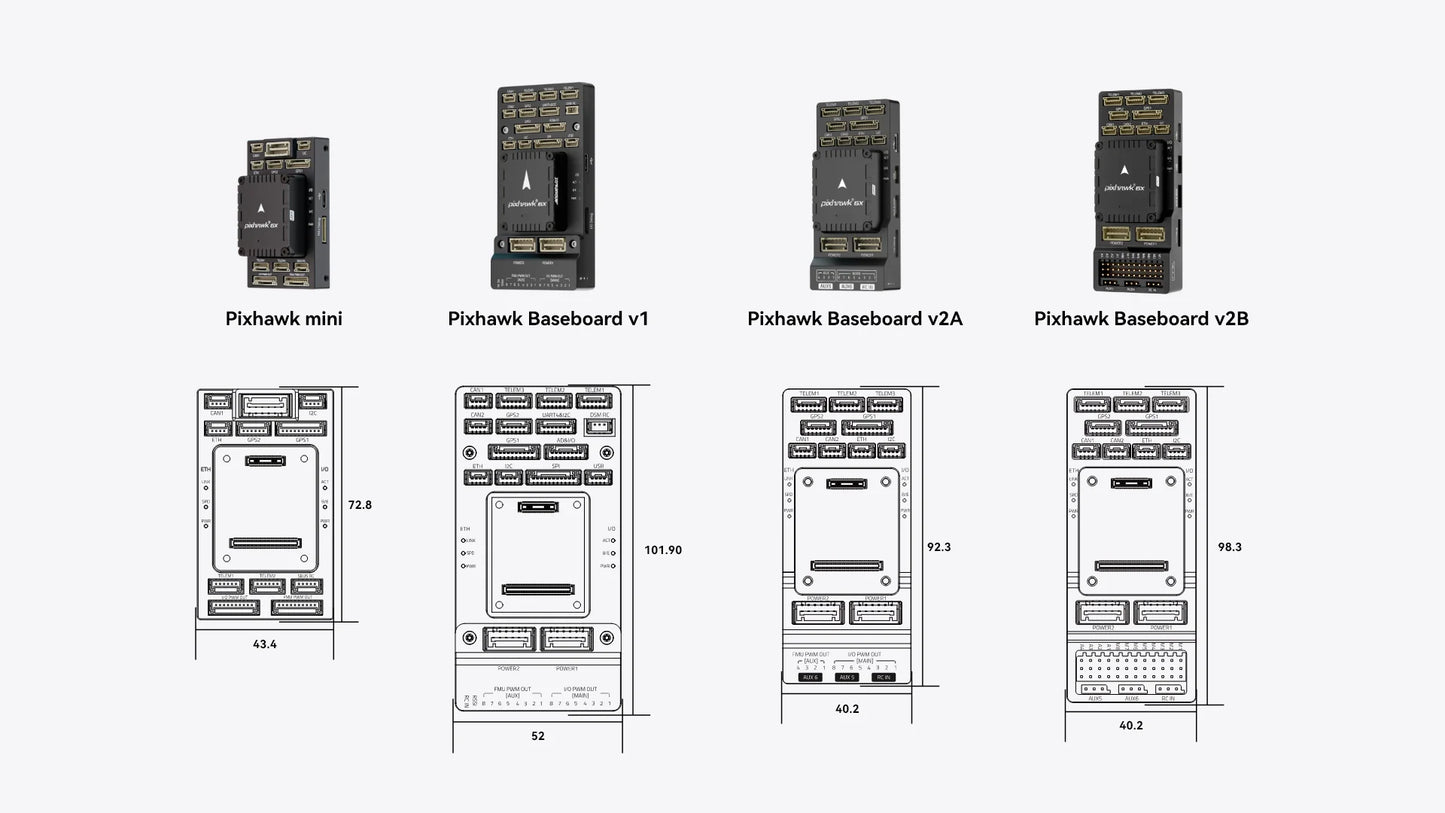
Pixhawk Baseboard v1 zu v2
- Das Pixhawk Baseboard v1 wurde durch die Versionen v2A & v2B ersetzt, mit folgenden Aktualisierungen:
- Kleineres und kompakteres Design: Die Gesamtfläche der Platine wurde reduziert, was die Integration in verschiedene Anwendungen erleichtert.
- Neues robustes Stiftleisten-Design: Verbesserte Zuverlässigkeit durch ein verbessertes Stiftleistengehäuse.
- Zusätzlicher PWM-Pegelwandler: Ermöglicht das Umschalten der PWM-Ausgangssignalpegel von 3,3 V auf 5 V über einen Widerstand.
- Änderung auf Aluminium-CNC-Gehäuse: Hochwertiges Aluminium-CNC-Außengehäuse bietet Haltbarkeit, effiziente Wärmeableitung, Korrosionsbeständigkeit, ästhetisches Erscheinungsbild und EMV-Abschirmung.
- Zwei Modelle verfügbar: Modell A und Modell B, jeweils mit Stiftleisten, die in verschiedene Richtungen zeigen, für mehr Flexibilität bei der Installation.
- Verlagerung der Ports: UART4 & I2C, SPI, AD & IO, DSM RC und JST USB Ports wurden von der Oberseite zur Seite der Platine verschoben. AUX7, AUX8 und SBUS_OUT/RSSI_IN sind in einem JST-GH Port an die Seite gewandert.
Spezifikationen
- FMU-Prozessor: STM32H753
- 32 Bit Arm® Cortex®-M7, 480MHz, 2MB Flash-Speicher, 1MB RAM
- IO-Prozessor: STM32F100
- 32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM
- Integrierte Sensoren
- 3x ICM-45686 IMU-Sensoren (±32g) mit BalancedGyro™ Technologie
- Magnetometer: BMM150
- Barometer: 2x BMP388
Elektrische Daten
- Spannungswerte:
- Maximale Eingangsspannung: 6V
- USB-Stromeingang: 4,75~5,25V
- Servo-Rail-Eingang: 0~36V
- Stromwerte:
- Stromstrombegrenzer Telem1-Ausgang: 1,5A
- Stromstrombegrenzer aller anderen kombinierten Ausgänge: 1,5A
Abmessungen
-
Abmessungen
- Flugcontroller-Modul: 38,8 x 31,8 x 14,6 mm
- Standard-Baseboard: 52,4 x 103,4 x 16,7 mm
- Mini-Baseboard: 43,4 x 72,8 x 14,2 mm
-
Gewicht
- Flugcontroller-Modul: 23g
- Standard-Baseboard: 51g
- Mini-Baseboard: 26,5g
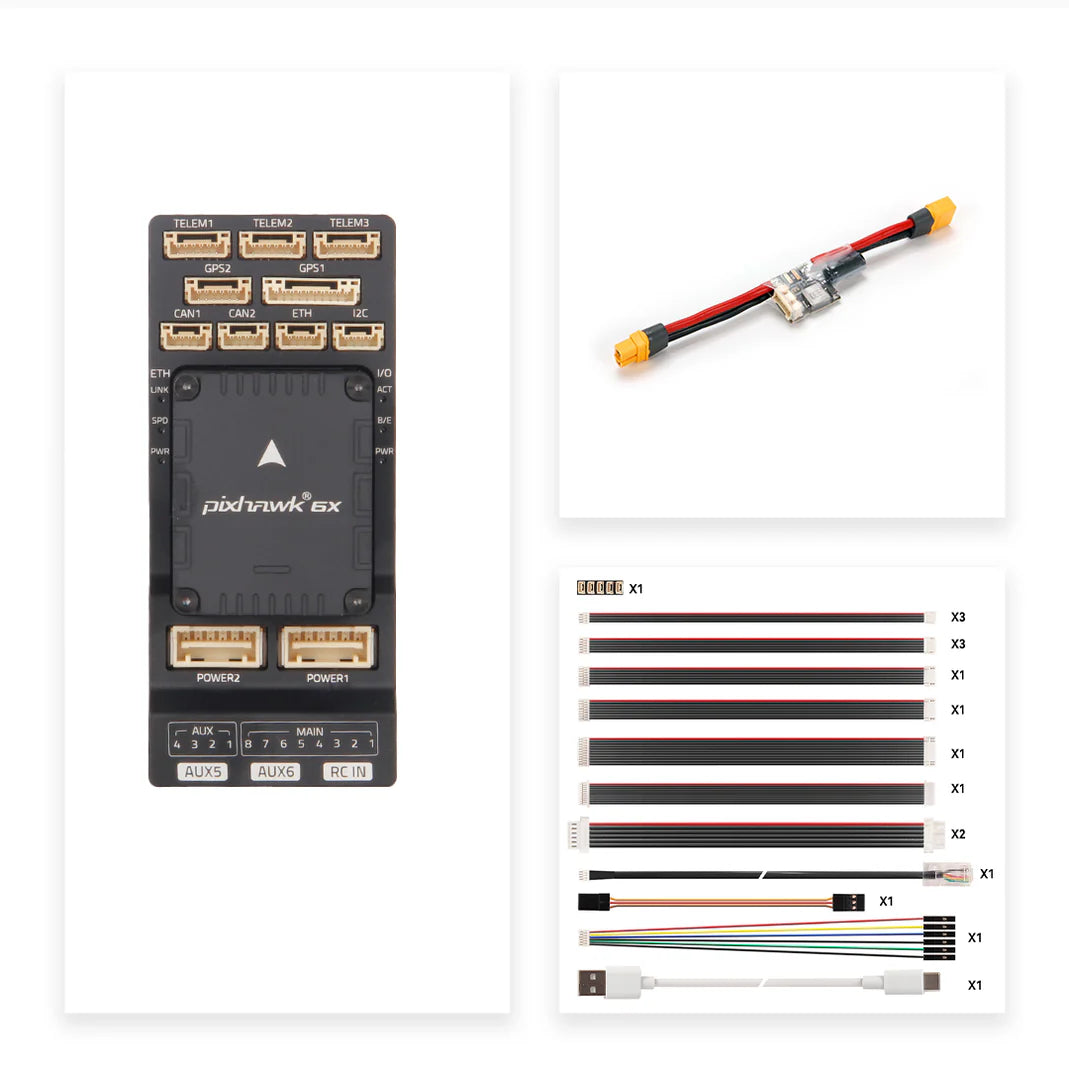
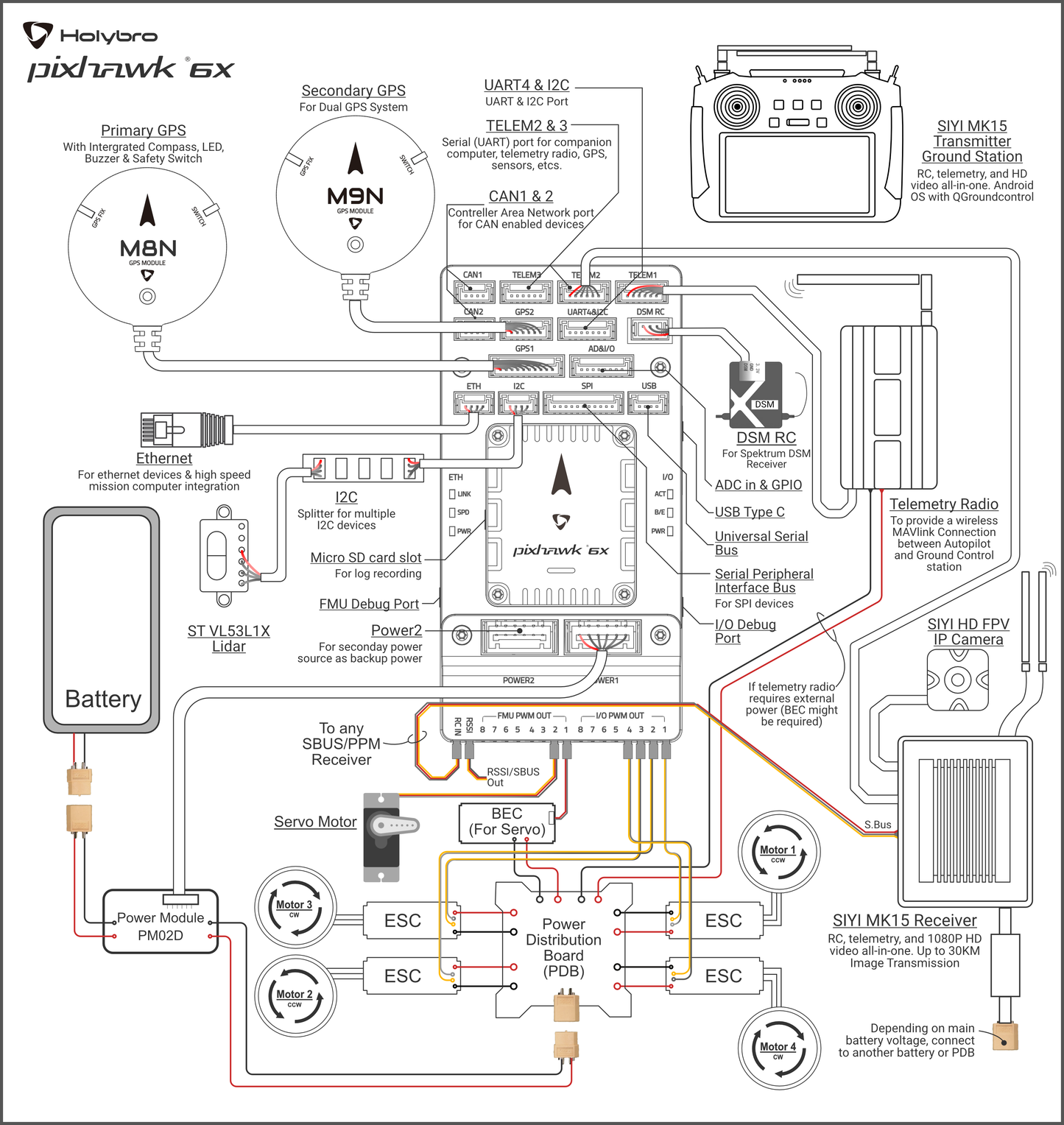
Schnittstellen
- 16-PWM Servoausgänge
- R/C-Eingang für Spektrum / DSM
- Dedizierter R/C-Eingang für PPM und S.Bus-Eingang
- Dedizierter analoger / PWM RSSI-Eingang und S.Bus-Ausgang
-
4 allgemeine serielle Ports
- 3 mit vollständiger Flusskontrolle
- 1 mit separatem 1,5A Strombegrenzer (Telem1)
- 1 mit I2C und zusätzlicher GPIO-Leitung für externen NFC-Leser
-
2 GPS-Anschlüsse
- 1 voller GPS-Anschluss plus Sicherheitsschalter-Anschluss
- 1 einfacher GPS-Anschluss
- 1 I2C-Anschluss
-
1 Ethernet-Anschluss
- Trafo-lose Anwendungen
- 100Mbps
-
1 SPI-Bus
- 2 Chip-Select-Leitungen
- 2 Daten-Ready-Leitungen
- 1 SPI SYNC-Leitung
- 1 SPI-Reset-Leitung
-
2 CAN-Busse für CAN-Peripherie
- CAN-Bus verfügt über individuelle Stummschaltungssteuerungen oder ESC RX-MUX-Steuerung
-
2 Stromeingangsports mit SMBus
- 1 AD & IO-Port
- 2 zusätzliche analoge Eingänge
- 1 PWM/Capture-Eingang
- 2 dedizierte Debug- und GPIO-Leitungen
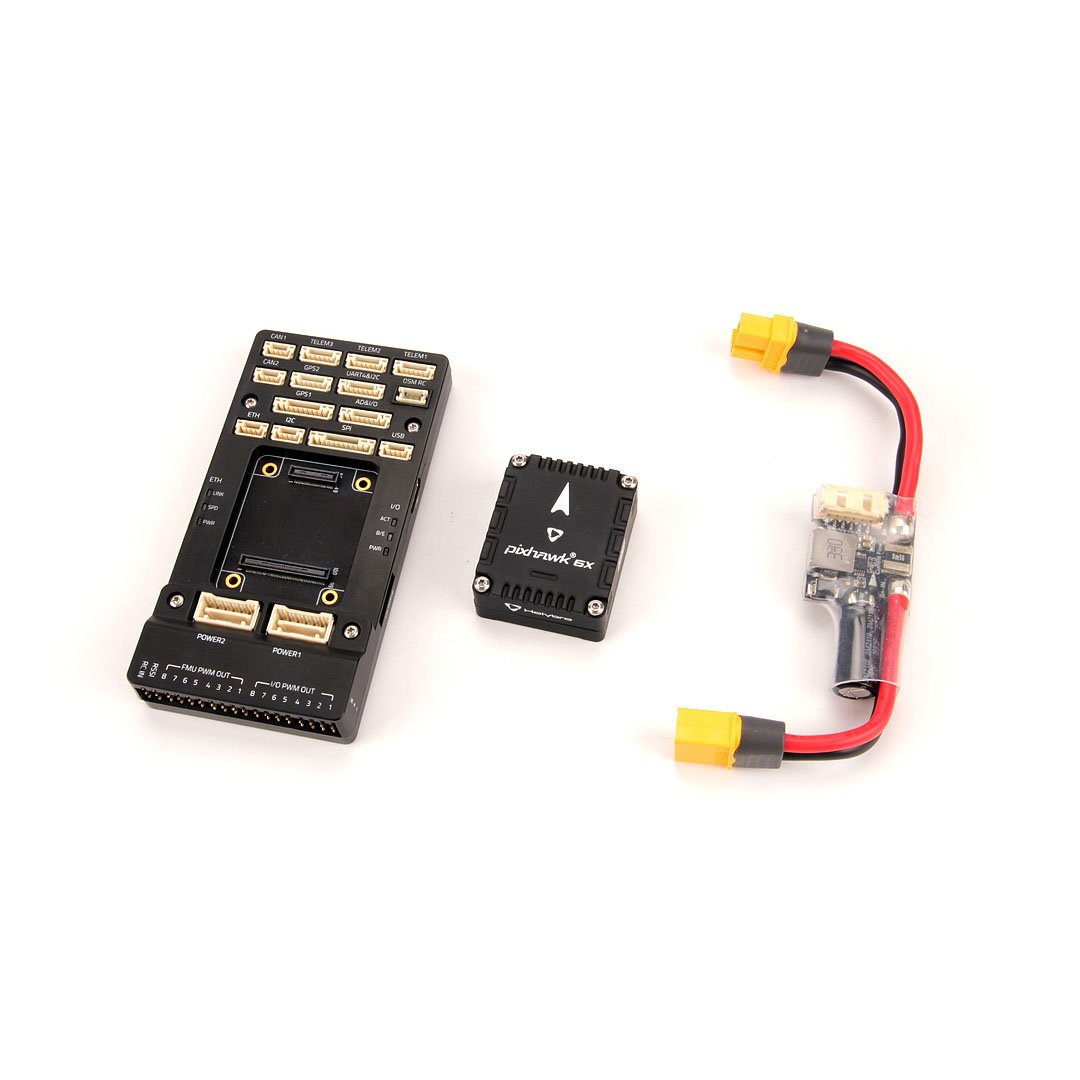
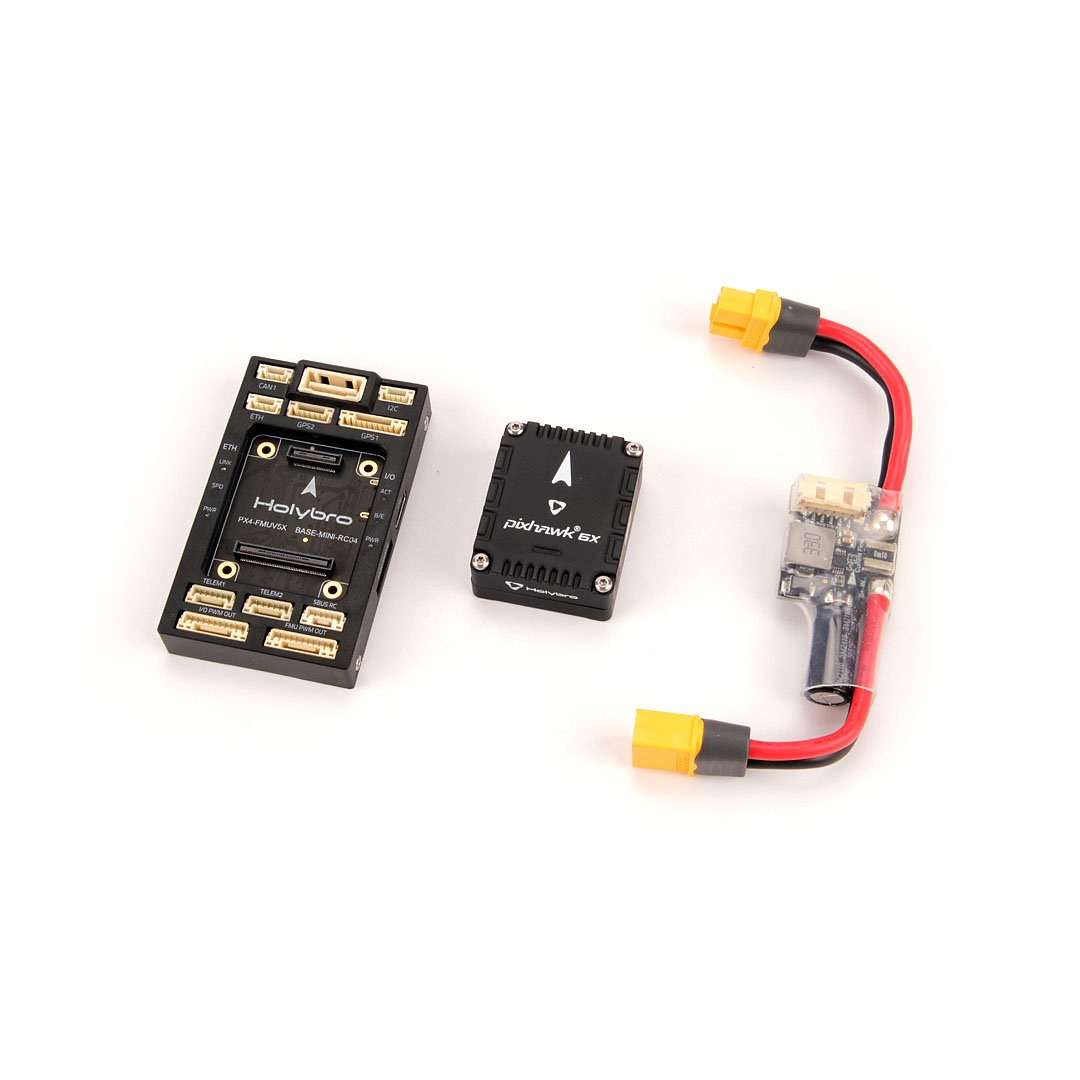
Enthalten
Standard-Set
- Pixhawk 6X Flugcontroller-Modul
- Pixhawk Standard Basis / Pixhawk Mini Basis
- PM02D Leistungsmodul
- Kabelsatz
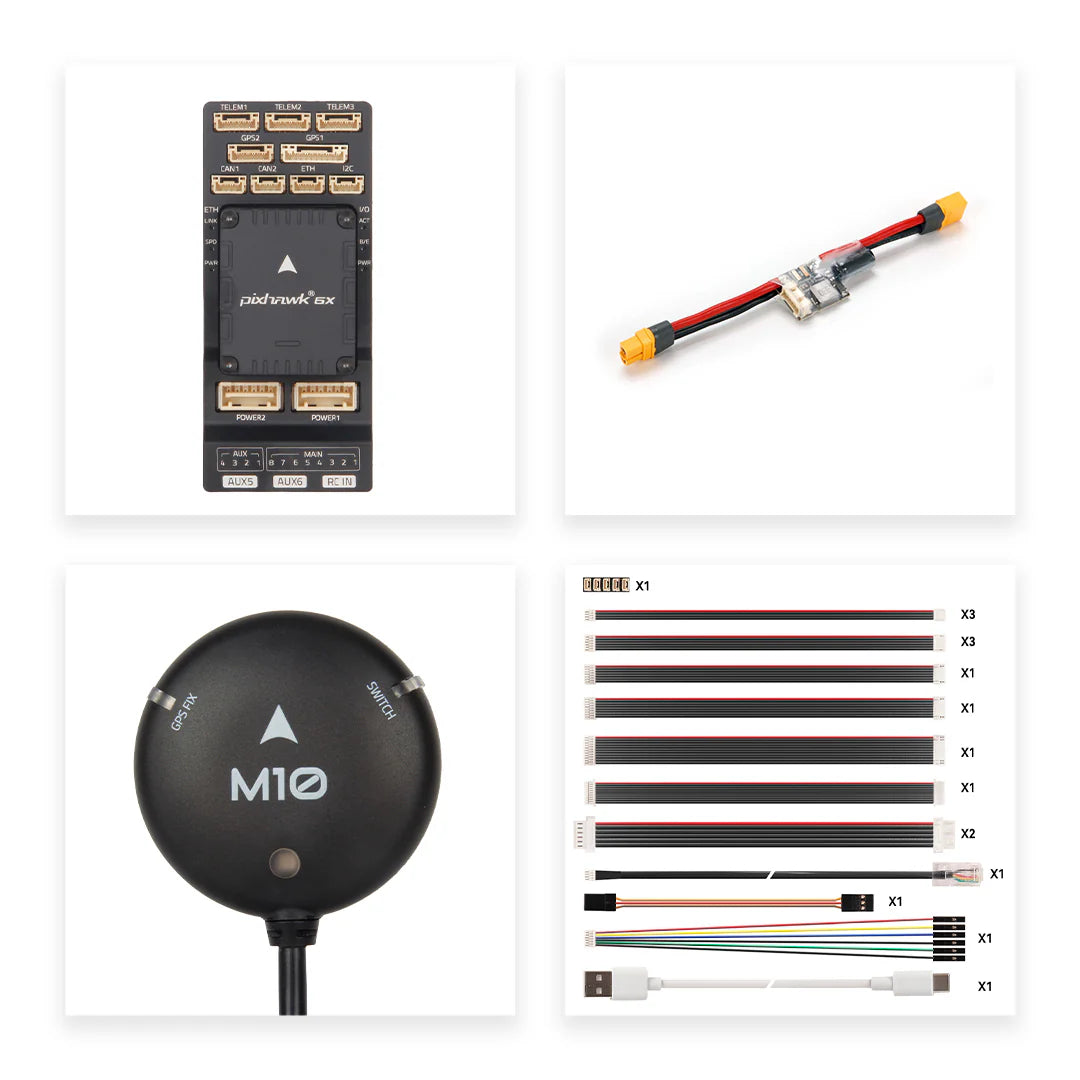
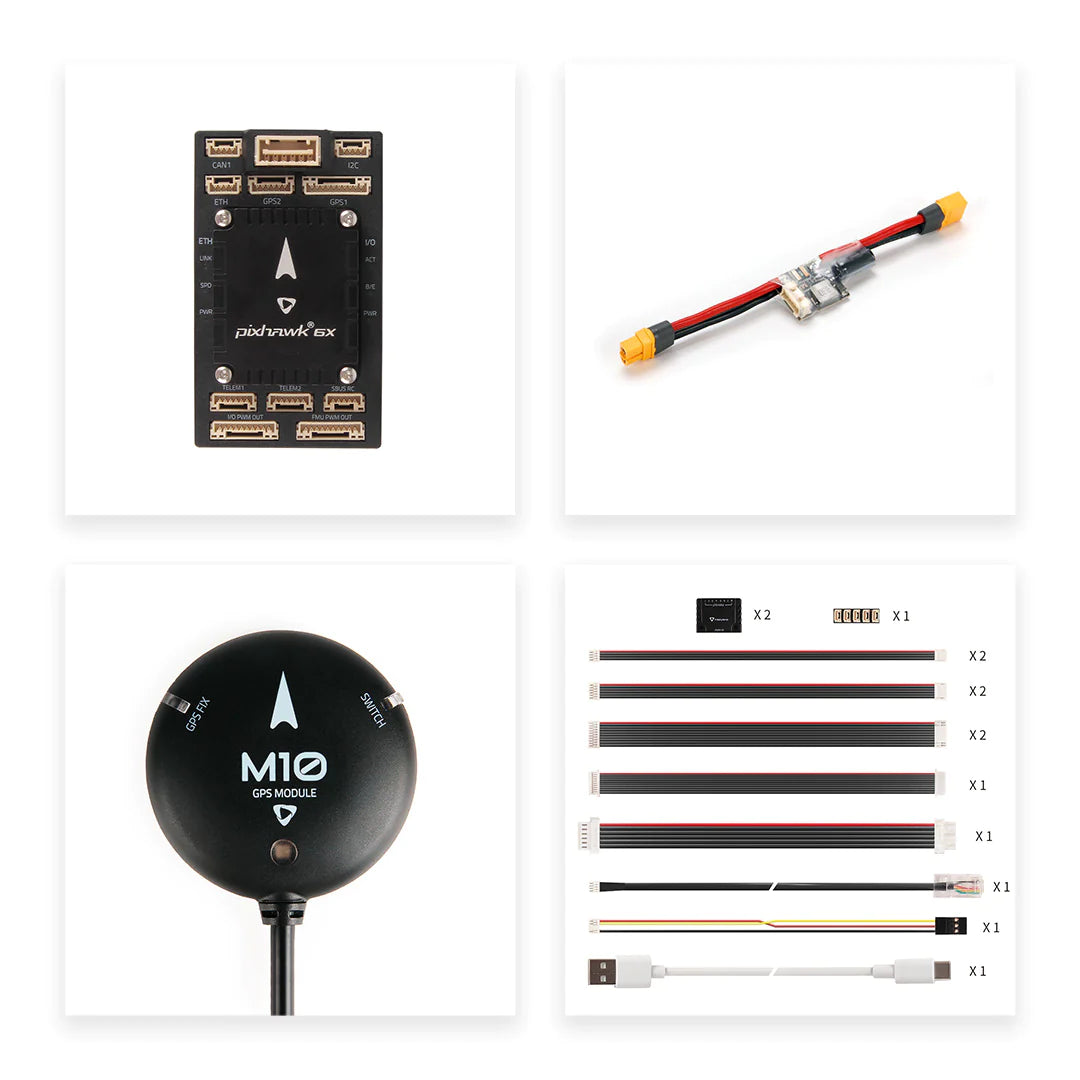
Standard-Set + M10 GPS
- Pixhawk 6X Flugcontroller-Modul
- Pixhawk Standard Basis / Pixhawk Mini Basis
- PM02D Leistungsmodul
- Kabelsatz
- M10 GPS