














Produktdetails
Happymodel ELRSF4 2.4GHz AIO 5-in-1 FC
Sie sind hier, um den Happymodel ELRSF4 2.4GHz AIO Flight Controller zu kaufen, und ja – wir sind hier, um ihn zu verkaufen, denn fünf Boards, die vorgeben, eins zu sein, ist der Höhepunkt der Tiny-Whoop-Evolution. Dies ist der weltweit erste 5-in-1 F4 AIO mit SPI ExpressLRS 2.4GHz, einem 4-in-1 ESC, OpenVTX, Betaflight OSD und keiner Geduld für klobige Stacks. Gebaut für Whoop-Racing, Toothpick-Freestyle und 1S Nano-Long-Range-Träume.

Warum Sie ihn wollen
Dieses Board wurde entwickelt, um Ihren Aufbau zu vereinfachen und Ihre Ausreden zu verkomplizieren. Mit einem STM32F411, der Betaflight ausführt, SX1280-basiertem SPI ELRS für geringe Latenz und einem integrierten 0–400mW OpenVTX erhalten Sie Reichweite, Klarheit und weniger Lötstellen, die Sie vermasseln können. V3.1 oder V3.3 – so oder so erhalten Sie einen modernen Kreisel, denn der MPU6000 ist in den Ruhestand gegangen und hat geangelt.
Spezifikationen
- MCU: STM32F411CEU6 @100MHz (kleine Platine, große Energie)
- Gyro: ICM20689 (V3.1) / BMI270 oder ICM42688P (V3.3)
- Firmware-Ziel: CRAZYBEEF4SX1280 (schnell aussprechen)
- Leistungsaufnahme: 1S LiPo/LiHV 2.9–4.35V (Whoop-Leben)
- ESC: 4-in-1 BLHeli_S, 5A Dauer, 6A Spitze (winzig, aber mutig)
- ESC-Protokoll: DSHOT600 (weil Latenz wichtig ist)
- Empfänger: SPI ExpressLRS 2.4GHz (einmal binden, für immer vergessen)
- ELRS Packet Rates: 25–500Hz (wählen Sie Ihr Gift)
- VTX: 5.8GHz OpenVTX 0–400mW, 48CH (innen bis außen)
- OSD: Eingebautes Betaflight OSD (SPI-gesteuert, offensichtlich)
- BEC: 5V 1A (genug, nicht gierig)
- Telemetrie-Leistung: <12dBm (effizient, nicht laut)
Onboard ESC Details
- ESC MCU: EFM8BB21 (verbessert, nicht nostalgisch)
- Firmware: O_H_5_REV16_8.HEX (Werk)
- Programmierbar: BLHeliSuite (verantwortungsbewusst anpassen)
Onboard VTX Details
- Ausgangsleistung: 0–400mW umschaltbar (wo zutreffend legal)
- Bänder: 6 Bänder, 48 Kanäle inkl. Raceband
- Steuerung: Smartaudio V2.1 ready
Kompatibilität
Kompatibel mit Original-Whoop-Größe. Perfekt für Tiny Whoop Racing, Toothpick Freestyle und 1S Ultraleicht-Nano-Long-Range-Builds, die keinen Sinn machen und doch so viel Spaß bringen.
Bindevorgang:
- Den Flight Controller durch Anschließen des USB mit Strom versorgen. Bitte stellen Sie sicher, dass der Port-Treiber des Flight Controllers auf dem Computer korrekt installiert ist. Öffnen Sie dann Betaflight Configurator (Empfehlung 10.8.0) zum Verbinden, wechseln Sie zur „Empfänger“-Oberfläche und klicken Sie dann auf „Empfänger binden“. Die rote LED an der Unterseite des Flight Controllers blinkt schnell, was bedeutet, dass der SPI ELRS-Empfänger in den Bindemodus wechselt. Es gibt eine weitere Möglichkeit, den Empfänger in den Bindemodus zu versetzen: Nach dem Verbinden mit dem Betaflight Configurator wechseln Sie zur CLI-Oberfläche und geben Sie „bind_rx“ in die Befehlszeile ein.
- Stellen Sie sicher, dass Sie die ELRS TX-Firmware bereits auf Version V2.0 aktualisiert haben. Nachdem Sie das ELRS TX-Modul korrekt an Ihren Funksender angeschlossen haben, kopieren Sie die Datei ELRSV2.LUA auf die SD-Karte im Funksender. Das Verzeichnis lautet „SD Card/Scripts/tools“. Führen Sie dann ELRSV2.LUA aus und klicken Sie dann auf „bind“, um sich mit dem SPI ExpressLRS-Empfänger zu verbinden. Die rote LED blinkt langsam, was bedeutet, dass die Bindung erfolgreich war.
- Nach erfolgreicher Bindung schalten Sie bitte den Funksender erneut ein. Die rote LED an der Unterseite des Flight Controllers leuchtet dann dauerhaft und die Telemetrie kann gleichzeitig empfangen werden.
- Die Bedeutung des LED-Status des SPI-Empfängers: Die LED leuchtet dauerhaft, was darauf hinweist, dass die Bindung erfolgreich war oder die Verbindung und Kommunikation normal ist. Die schnell blinkende LED zeigt an, dass sich der Empfänger im Bindemodus befindet, und die langsam blinkende LED zeigt an, dass kein Signal vom Funkcontroller empfangen wird.
Firmware, Hex-Datei und Standard-Diff-Download
http://www.happymodel.cn/index.php/2022/02/23/elrsf4-2g4-v3-1-flight-controller-firmware-and-default-factory-diff/
Online-Konfigurator hier
Lieferumfang*
- 1× ELRSF4 2.4GHz AIO 5-in-1 Flight Controller
Haftungsausschluss
Komponentenrevisionen können variieren (danke, globale Lieferketten), aber Leistung, Funktionen und Ihre Fähigkeit, abzustürzen, bleiben voll intakt.
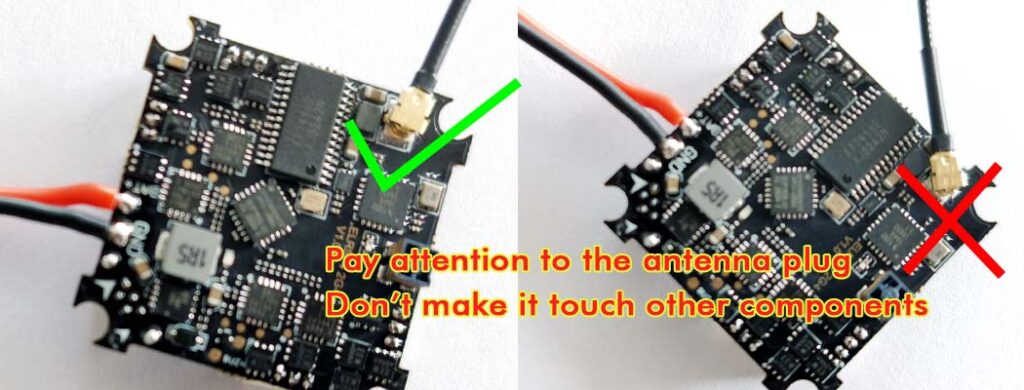
Hinweise: Aufgrund des Hochleistungs-VTX an Bord wird die Temperatur des AIO Flight Controllers im Standby-Zustand relativ hoch sein, und das Kamerasignal kann nach einigen Minuten Standby verloren gehen. Dies ist ein normales Phänomen, bitte machen Sie sich keine Sorgen. Wir empfehlen dringend, einen Lüfter zur Kühlung zu verwenden, wenn Sie die Flugsteuerung einrichten. Bitte stellen Sie sicher, dass die VTX-Antenne angeschlossen ist, bevor Sie den AIO Flight Controller mit Strom versorgen.
Da Betaflight die offizielle Firmware, die das SPI ExpressLRS-Protokoll unterstützt, noch nicht veröffentlicht hat, handelt es sich bei der aktuellen Version um die Beta-Version (Ziel: CrazybeeF4SX1280). Betaflight wird demnächst auf sein offizielles Ziel aktualisieren. Bitte zögern Sie nicht, uns zu kontaktieren, wenn Sie Probleme mit dieser Beta-Version der Firmware haben.
Bitte ändern Sie die "PID-Loop-Frequenz" auf "2kHz", manchmal würde dies dazu führen, dass der SPI-Empfänger nicht korrekt funktioniert, während der Wert "8kHz" ist.
Immer noch hier?
Sie haben das gesamte Datenblatt gelesen – Respekt. Wenn Sie weniger Kabel, mehr Reichweite und ein Board wollen, das fast alles kann, außer selbst zu fliegen, dann ist dieser ELRSF4 AIO Ihr Zeichen. Holen Sie sich einen und hören Sie auf, so zu tun, als wäre Ihr aktueller Build "provisorisch".