




Produktdetails
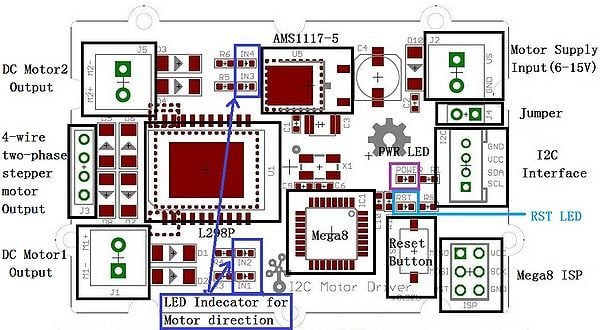
Das Grove - I2C Motortreiber V1.3 (neueste Version) kann direkt Schrittmotoren oder Gleichstrommotoren steuern. Sein Herzstück ist ein zweikanaliger H-Brücken-Treiberchip (L298N), der Ströme von bis zu 2A pro Kanal verarbeiten kann, gesteuert von einem Atmel ATmega8L, der die I2C-Kommunikation mit Plattformen wie Arduino übernimmt. Beide Motoren können gleichzeitig mit unterschiedlicher Geschwindigkeit und Richtung betrieben werden. Es kann zwei gebürstete Gleichstrommotoren oder einen 4-Draht-Zwei-Phasen-Schrittmotor antreiben. Es benötigt eine Stromversorgung von 6V bis 15V für den Motor und verfügt über einen integrierten 5V Spannungsregler, der den I2C-Bus und den Arduino versorgen kann (wählbar über Jumper). Alle Treiberleitungen sind durch Dioden vor Gegen-EMK geschützt.
Spezifikationen
| Artikel | Min | Typisch | Max | Einheit |
|---|---|---|---|---|
| Betriebsspannung | 6 | - | 15 | VDC |
| Max. Ausgangsstrom pro Kanal | 0.5 | A | ||
| Maximaler Gesamtstrom | 1.0 | A | ||
| Eingangs-/Ausgangsspannung am I2C-Bus | 5 | V | ||
| Kommunikationsprotokoll | I2C | / | ||
[1] HINWEIS: Die Eingangsspannung an den Schraubklemmen wird auf 5 V reguliert und über einen Jumper (J4) mit dem I2C +5 V verbunden. Entfernen Sie den Jumper, wenn sowohl externe Stromversorgung über die Schraubklemmen als auch Stromversorgung über den I2C-Header verwendet wird. Verwenden Sie den Jumper, wenn 5 V an den I2C-Bus geliefert werden sollen.
Pinbelegungen
| Pad-Typ | Pin-Status | Beschreibung |
|---|---|---|
| GND | Eingang | Masseanschluss |
| VS | Eingang | Motorstromversorgung (6-15V), auch für 1117-5 Regler |
| SDA | Eingang und Ausgang | I2C serielle Daten (+5V Logik) |
| SCL | Eingang | I2C serielle Taktung (+5V Logik) |
| VCC | Ausgang oder NC (nicht verbunden) | Wenn der Jumper gesteckt ist, VCC als +5V Ausgang für externe MCU (Xduinos); NC wenn der Jumper entfernt ist. |
| M1+,M1-,M2+,M2- | Ausgang | DC-Motor-Ausgang, relevant für VS |
Anwendungsideen
Dieser Motortreiber kann verwendet werden, um jeden gebürsteten Elektromotor anzutreiben, solange er bei 5 V nicht mehr als 2 A verbraucht. Zwei Motoren können gleichzeitig mit unterschiedlicher Geschwindigkeit und Richtung betrieben werden. Die Geschwindigkeit kann vollständig proportional eingestellt werden und wird durch den ATmega8 auf der Platine mittels PWM gesteuert. Dies erfolgt durch I2C-Befehle, die z.B. von einem Arduino gesendet werden. Er ist perfekt für Anwendungen wie Roboter, selbstgebaute RC-Autos, Gehäuselüfter, leistungsstarke LED-Beleuchtung oder jedes andere Projekt, das eine proportionale Laststeuerung beinhaltet.
Vorsichtsmaßnahmen
- Die Platine wird bei Betrieb über 1 Ampere sehr heiß. Halten Sie Ihre Hände fern!
- Verschiedene Arduino IDEs können Unterschiede aufweisen. Ich benutze arduino-0019 und es funktioniert gut, aber wenn ich arduino-0022 benutze, muss ich am Ende von Wire.endTransmission() eine delay() hinzufügen.
Dokumente
Bitte besuchen Sie unsere Wiki-Seite für weitere Informationen zu diesem Produkt. Wir würden uns freuen, wenn Sie uns helfen könnten, die Dokumente zu verbessern, weitere Beispielcodes oder Tutorials hinzuzufügen.