













Produktdetails
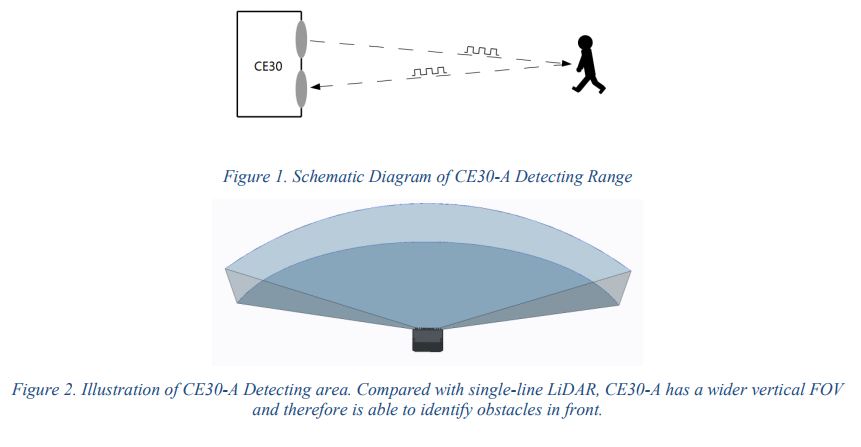
- CE30-A ist ein Festkörper-Infrarot-LiDAR, das auf dem ToF-Prinzip basiert. Ausgestattet mit seinem speziellen Hardware-Design kann es die Messung eines weiten horizontalen Sichtfelds (FOV) durchführen und gleichzeitig Grau- und Tiefeninformationen ausgeben. Mit seinem speziell optimierten Hindernisvermeidungsmodus kann der interessierende Erfassungsbereich eingestellt werden, und die Einzelpunkt-Projektionsdistanzinformation des nächsten Distanzpunktes kann über CANBUS übertragen werden. Im Vergleich zu Einzellinien-Scanning-LiDARs enthält CE30-A keine rotierenden Komponenten, was die Zuverlässigkeit des Langzeitbetriebs und einen größeren vertikalen Erfassungsbereich gewährleistet.
Wenn Sie mehr als 50 Einheiten bestellen möchten, kontaktieren Sie uns bitte für Mengenrabatte.

CE30-A Spezifikationen

CE30-A Datenblatt
Prinzip der Entfernungsmessung
Das Entfernungsprinzip des CE30-A basiert auf dem Time of Flight (TOF) Prinzip. CE30-A sendet moduliertes Nahinfrarotlicht aus, das vom Objekt reflektiert und vom CE30-A wieder empfangen wird. CE30-A berechnet die Phasendifferenz und Zeitdifferenz zwischen dem ausgesendeten und empfangenen Licht, die anschließend in die Entfernung der abgetasteten Szene umgewandelt wird.


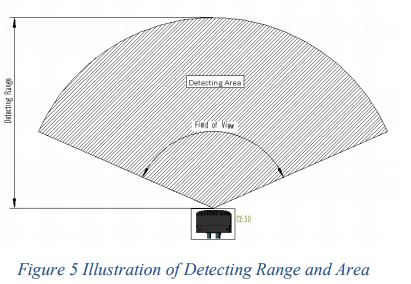
Im Arbeitsmodus kann der CE30-A alle Positionen innerhalb des Erfassungsbereichs (innerhalb des Erfassungs-Sichtfelds) erkennen und die Distanzinformationen zurückgeben. Die Ergebnisse der Distanz und des Erfassungsbereichs sind in Abbildung 5 dargestellt.

Die weiteste Erfassungsreichweite jedes Winkels wurde für allgemeine Hindernisvermeidungsszenarien optimiert, was sich von der regulären Erfassungsreichweite unterscheidet. Das Schema ist in Abbildung 6 dargestellt (Anpassungen für spezielle Anforderungen sind möglich).