




Produktdetails
Aufgrund des Alters dieses Produkts verkaufen wir den APM2.8 nur noch als Auslaufmodell. Die Firmware wurde seit über 2 Jahren nicht mehr aktualisiert, und wir bieten keinerlei Einrichtungsunterstützung/Beratung an. Sollte das Gerät direkt nach dem Auspacken einen Hardwarefehler aufweisen, helfen wir Ihnen gerne, ansonsten können wir für diesen Artikel keinen Support mehr anbieten. Wir empfehlen Ihnen stattdessen, die neueren Pixhawk-basierten Autopiloten zu verwenden, die wir verkaufen.
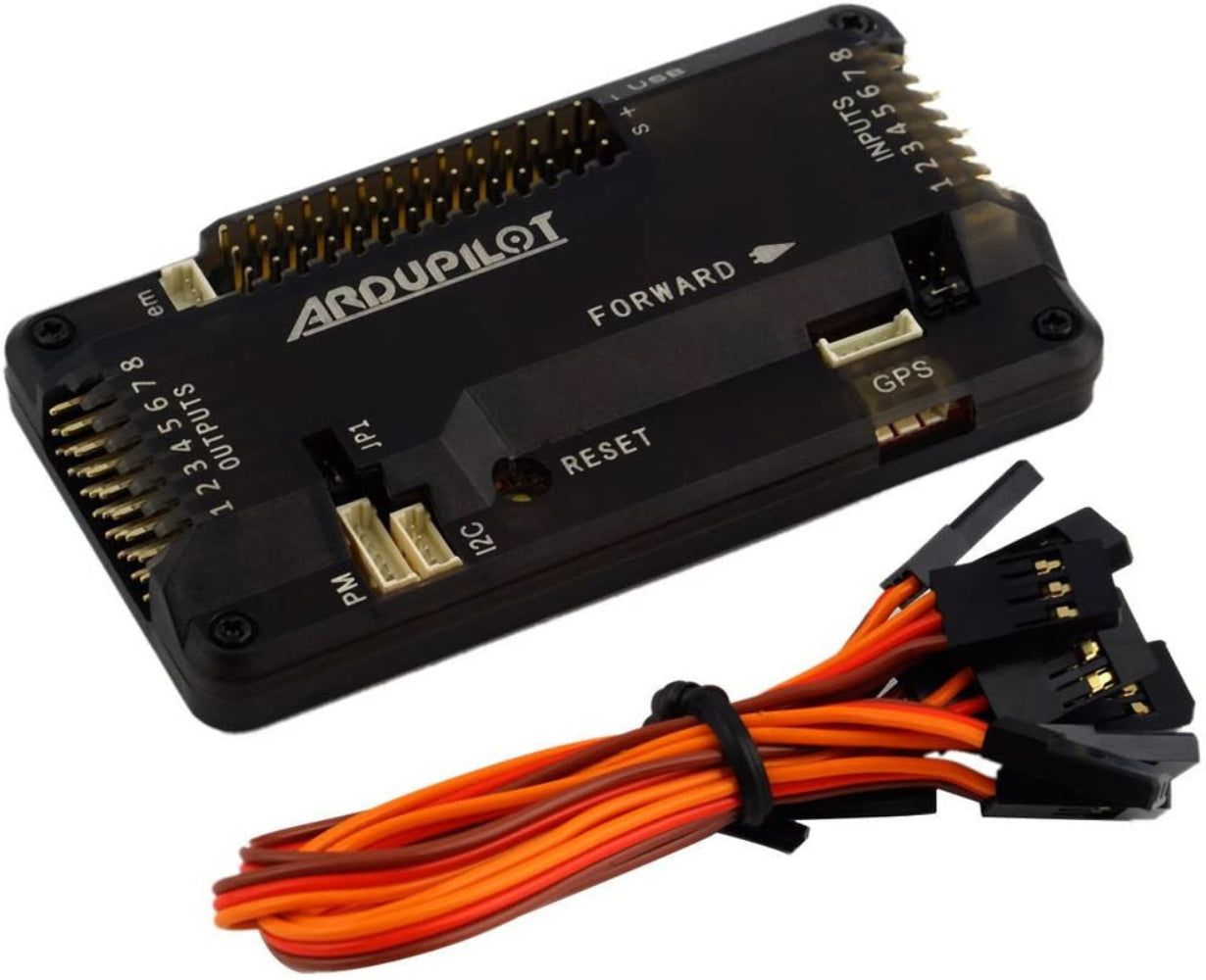
Dies ist der neue APM 2.8 Flugcontroller. Die Sensoren sind exakt die gleichen wie beim APM 2.6 Flugcontroller, jedoch besteht hier die Möglichkeit, entweder den eingebauten Kompass oder einen externen Kompass über einen Jumper zu verwenden. Dies macht den APM 2.8 ideal für den Einsatz mit Multikoptern und Rovern.
Der APM 2.8 ist ein komplettes Open-Source-Autopilotensystem und die meistverkaufte Technologie, die den prestigeträchtigen Outback Challenge UAV-Wettbewerb gewonnen hat. Er ermöglicht es dem Benutzer, jedes Starrflügel-, Drehflügel- oder Multirotor-Fahrzeug (sogar Autos und Boote) in ein voll autonomes Fahrzeug zu verwandeln, das in der Lage ist, programmierte GPS-Missionen mit Wegpunkten durchzuführen.
Diese Revision der Platine verfügt über einen optionalen Bordkompass, der für Fahrzeuge (insbesondere Multikopter und Rover) entwickelt wurde, bei denen der Kompass so weit wie möglich von Strom- und Motorquellen entfernt platziert werden sollte, um magnetische Interferenzen zu vermeiden. (Bei Starrflügelflugzeugen ist es oft einfacher, den APM weit genug von den Motoren und ESCs entfernt zu montieren, um magnetische Interferenzen zu vermeiden, daher ist dies nicht so kritisch, aber der APM 2.8 bietet mehr Flexibilität bei der Positionierung und ist auch für diese eine gute Wahl). Dieser ist für die Verwendung mit dem 3DR uBlox GPS mit Kompass vorgesehen, so dass die GPS/Kompass-Einheit weiter von Störquellen entfernt montiert werden kann als der APM selbst.
Der APM 2.8 benötigt eine GPS-Einheit für die volle Autonomie. Sie können über die oben genannten Optionen zusätzliche Extras zu Ihrer AMP 2.8 Platine hinzufügen.
Verwendung des eingebauten Kompasses
Um den eingebauten Kompass zu verwenden, schließen Sie einfach den Jumper wie unten gezeigt an. Wenn der Kompass-Jumper entfernt wird, verwendet die APM-Platine den externen Kompass, was am besten für Multirotoren mit einem extern montierten GPS/Kompass-Modul ist.
 .
.
LEISTUNGSSTARKE BODENKONTROLLSOFTWARE
Die herunterladbare Mission Planner Software dient zur Konfiguration und Steuerung Ihrer Ardupilot-Platine. Zu den Funktionen gehören:
- Punkt-und-Klick-Wegpunkteingabe, unter Verwendung von Google Maps.
- Auswahl von Missionsbefehlen aus Dropdown-Menüs
- Herunterladen von Missionslogdateien und deren Analyse
- Konfiguration der APM-Einstellungen für Ihr Fluggerät
- Schnittstelle zu einem PC-Flugsimulator, um einen vollständigen Hardware-in-the-Loop UAV-Simulator zu erstellen.
- Anzeige der Ausgabe des seriellen Terminals von APM
WAS KANN DIE APM PLATINE STEUERN?
Die ArduPilot Mega Platine kann Flugzeuge, Kopter und Rover steuern. Alles, was Sie tun müssen, ist, die entsprechende Software mit wenigen Klicks auf die Platine zu laden.
EIGENSCHAFTEN:
- Arduino-kompatibel!
- Inklusive 3-Achsen-Gyro, Beschleunigungsmesser und einem Hochleistungs-Barometer
- Onboard 4 Megabyte Dataflash-Chip für automatische Datenaufzeichnung
- Optionales Off-Board-GPS, uBlox LEA-6H Modul mit Kompass.
- Eines der ersten Open-Source-Autopilotsysteme, das den 6-DoF-Beschleunigungsmesser/Gyroskop MPU-6000 von Invensense verwendet.
- Barometrischer Drucksensor auf MS5607 von Measurement Specialties aufgerüstet.
- Atmel ATMEGA2560 und ATMEGA32U-2 Chips für die Verarbeitung bzw. USB-Funktionen.
- Gewicht: 30g