












Détails du produit
L'autopilote Pixhawk® 4 Mini est conçu pour les ingénieurs et les amateurs qui cherchent à exploiter la puissance du Pixhawk 4 mais travaillent avec des drones plus petits. Le Pixhawk 4 Mini reprend le processeur FMU et les ressources mémoire du Pixhawk 4 tout en éliminant les interfaces normalement inutilisées. Cela permet au Pixhawk 4 Mini d'être suffisamment petit pour s'intégrer dans un drone de course de 250 mm.
Le Pixhawk 4 Mini a été conçu et développé en collaboration avec Holybro® et Auterion®. Il est basé sur la norme de conception Pixhawk FMUv5 et est optimisé pour exécuter le logiciel de contrôle de vol PX4.
- Processeur FMU principal : STM32F765, ARM® Cortex®-M7 32 bits, 216 MHz, 2 Mo de mémoire, 512 Ko de RAM
- Capteurs embarqués : Accel/Gyro : ICM-20689, Accel/Gyro : BMI055, Magnétomètre : IST8310, Baromètre : MS5611, GPS : récepteur GPS/GLONASS Ublox Neo-M8N ; magnétomètre IST8310 intégré
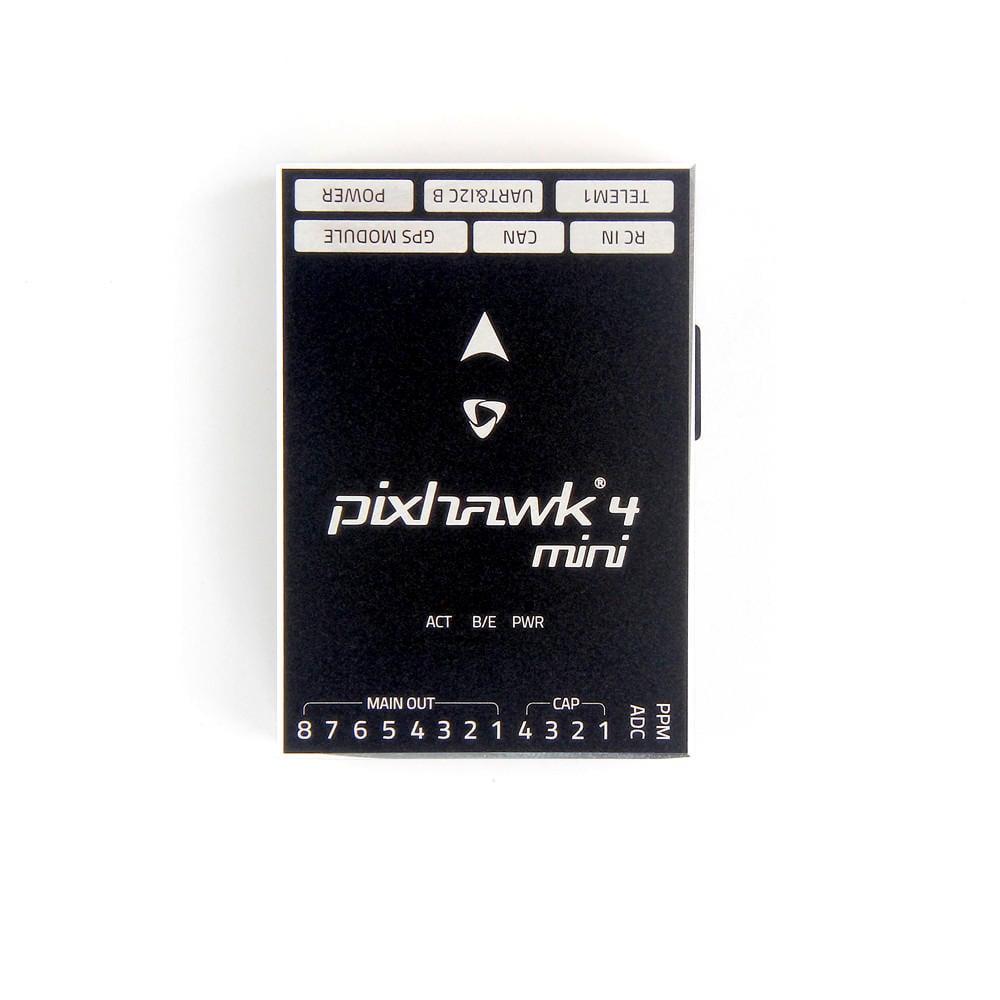
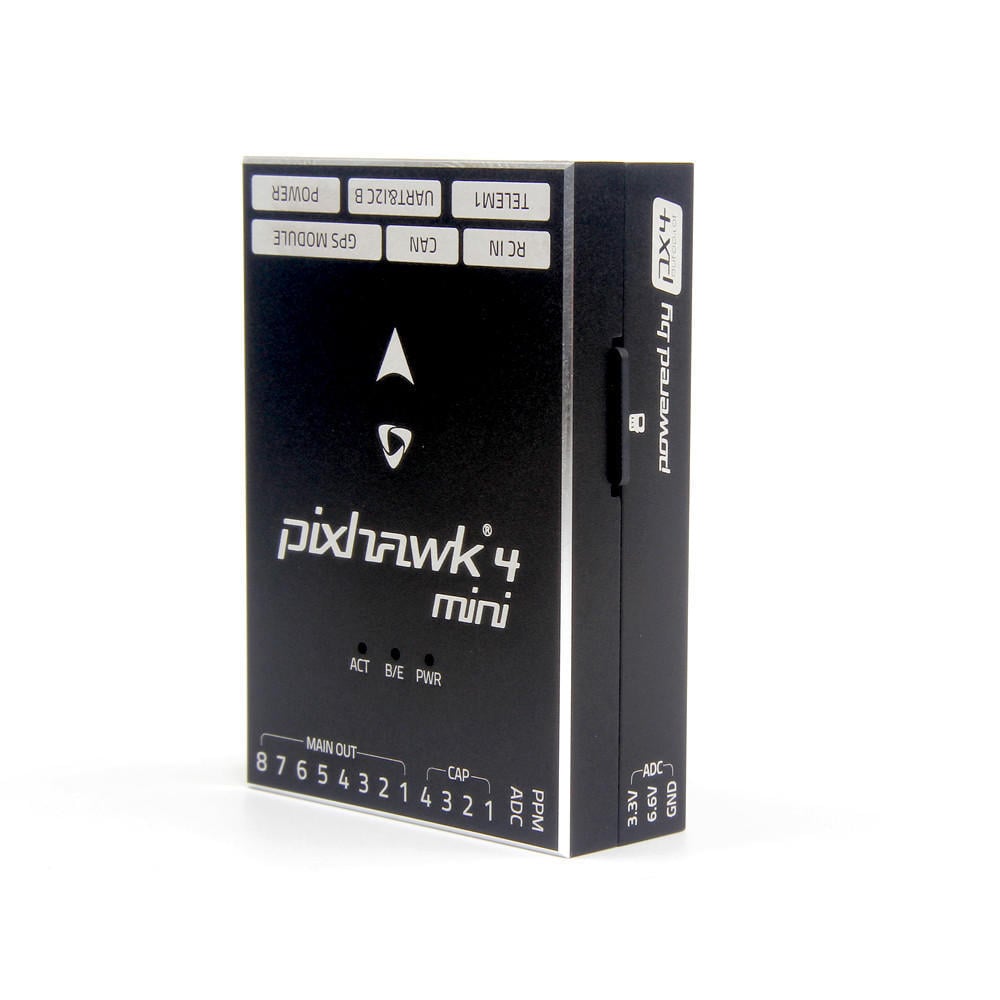
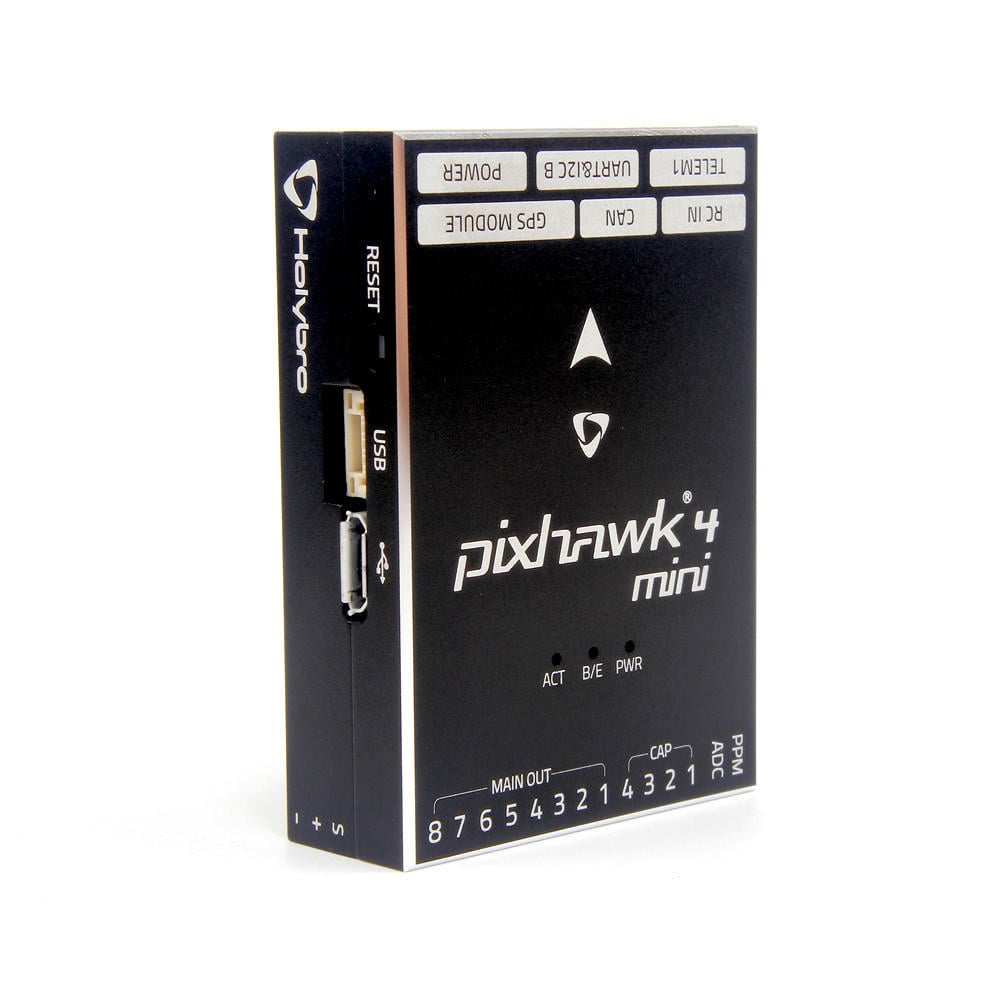
- Interfaces : 8 sorties PWM, 4 entrées PWM/Capture dédiées sur FMU, entrée R/C dédiée pour CPPM, entrée R/C dédiée pour Spektrum / DSM et S.Bus avec entrée RSSI analogique / PWM, 3 ports série à usage général, 2 ports I2C, 3 bus SPI, 1 CANBus pour CAN ESC, entrées analogiques pour la tension/le courant de la batterie, 2 entrées analogiques supplémentaires
- Système d'alimentation : entrée Power Brick : 4,75~5,5 V, entrée d'alimentation USB : 4,75~5,25 V, entrée Rail Servo : 0~24 V, détection de courant max : 120 A
Contenu du kit
- Contrôleur de vol Pixhawk® 4 mini
- Carte de gestion de l'alimentation
- Jeu de câbles