










Détails du produit
Le H743-WING v3 est une version repensée du populaire contrôleur de vol H743 Wing de Matek ICM42605, avec des connecteurs et un agencement de composants révisés pour rendre la carte encore meilleure qu'avant. Le meilleur dans tout cela, c'est que ce contrôleur de vol peut être utilisé avec Betaflight, Inav et Ardupilot.

Mise à jour vers la V3
Le H743-WING-V2 (PCB violet) a été mis à jour vers la V3 (PCB bleu) depuis fin avril 2022.
IMU ICM42688-P (V3) + ICM42605 au lieu de MPU6000 (V2) + ICM42605
Mêmes fonctions, disposition, schéma de câblage et mappage I/O.



Ressources
- Instructions Wiki Ardupilot
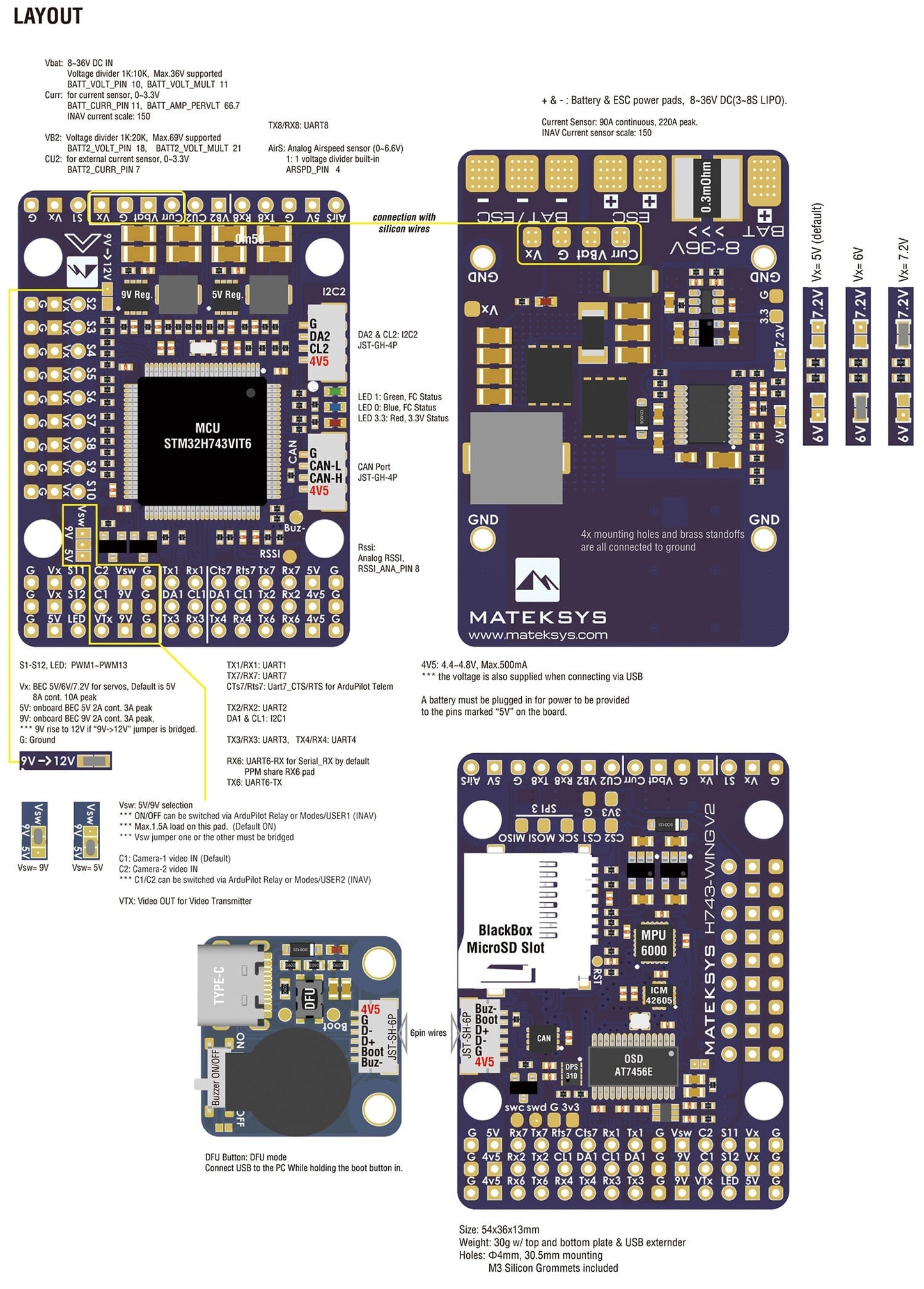
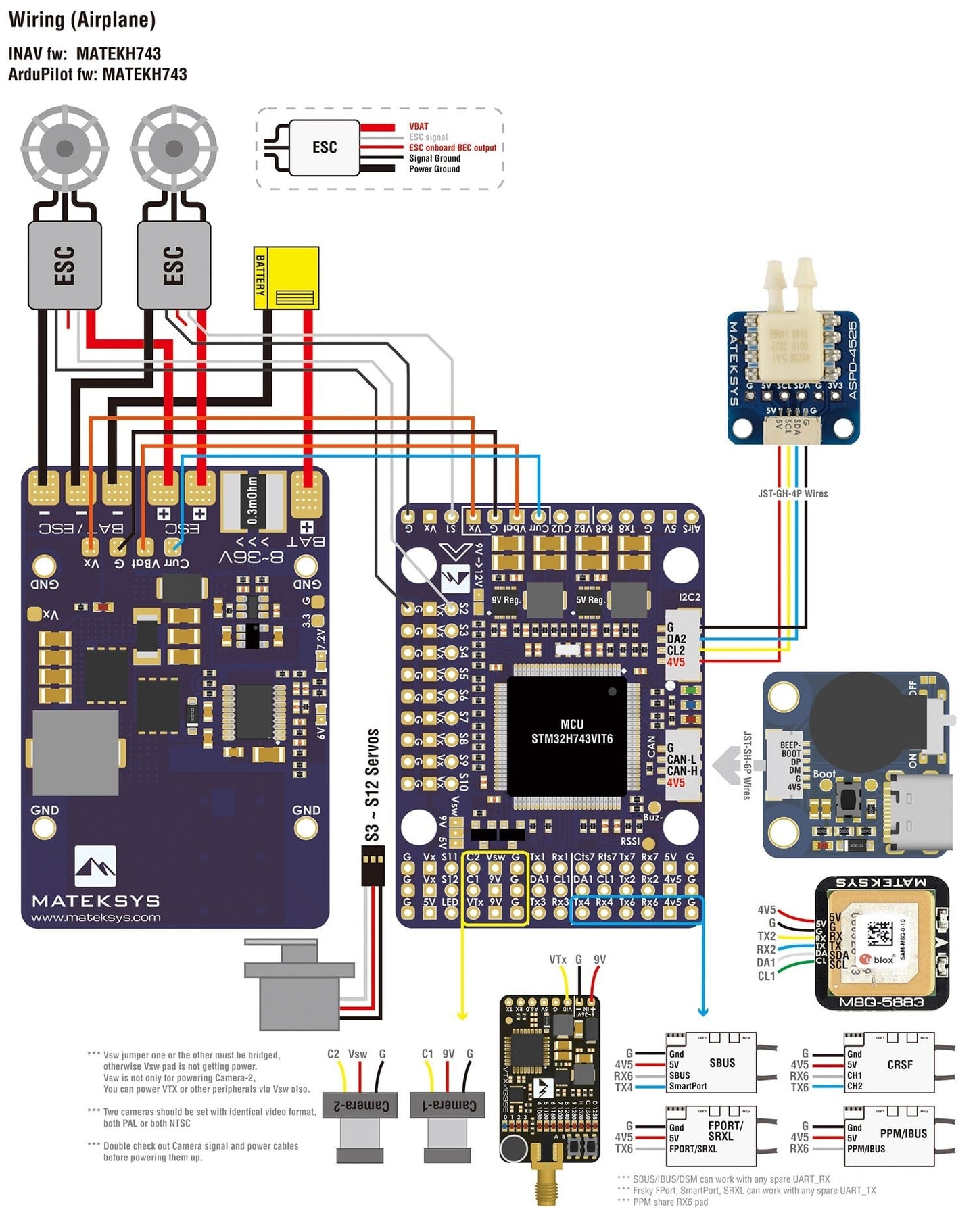
- Manuel H743-WING-V2 (incluant les schémas de brochage et de câblage)
Spécifications
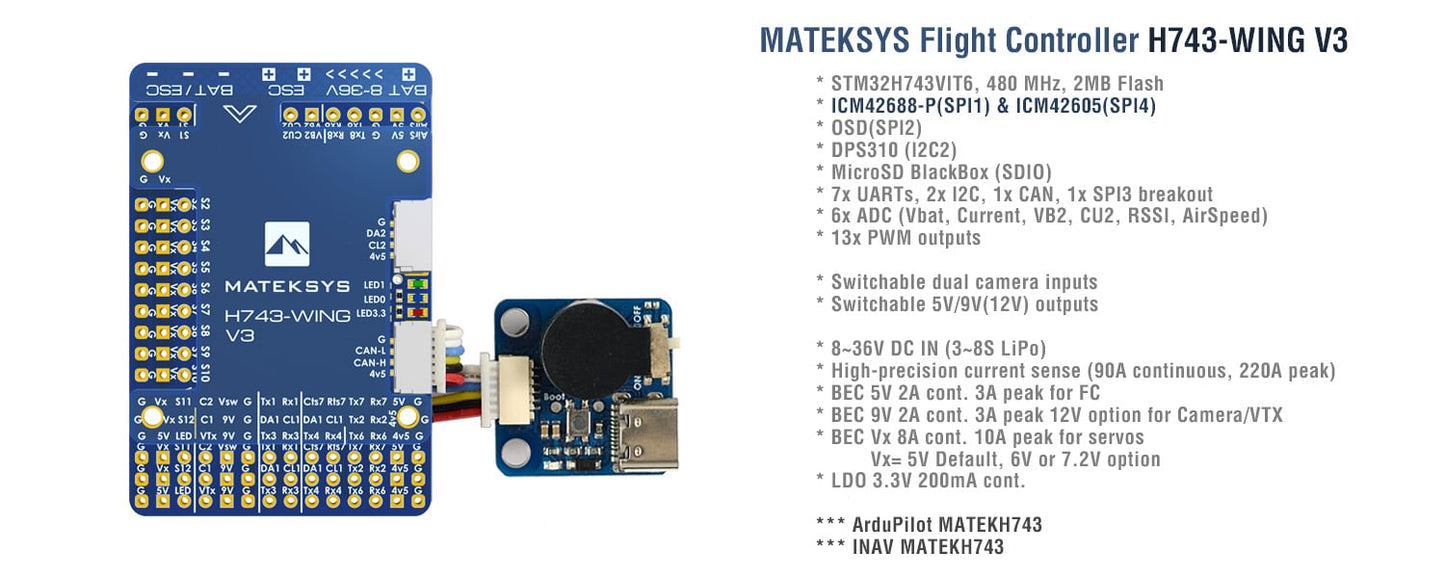
Spécifications du FC
- Tension d'entrée : 3-8S LiPo
- MCU : STM32H743VIT6
- Gyroscope : ICM42688-P / ICM42605
- OSD : Oui
- UARTs : 8 ensembles
- Connexions ESC : Oui
- Firmware : MATEKH743
- BEC : 3.3V, 5V, 9V, 12V
- Capteur de courant : Oui
- Buzzer : Oui
- Baromètre : Oui
- Boîte noire : Micro SD
- Taille de la pile : Non monté en pile
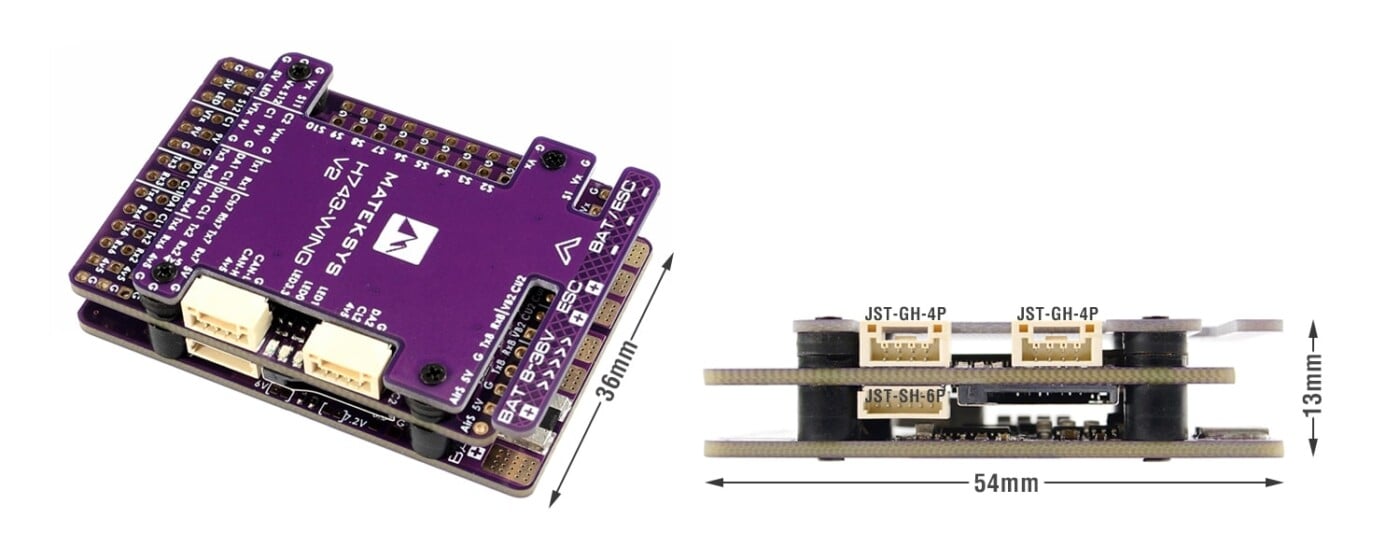
- Dimensions : 54x36x13mm
- Poids : 30g
Firmware FC
- ArduPilot (ChiBiOS) : MATEKH743
- INAV : MATEKH743
PDB
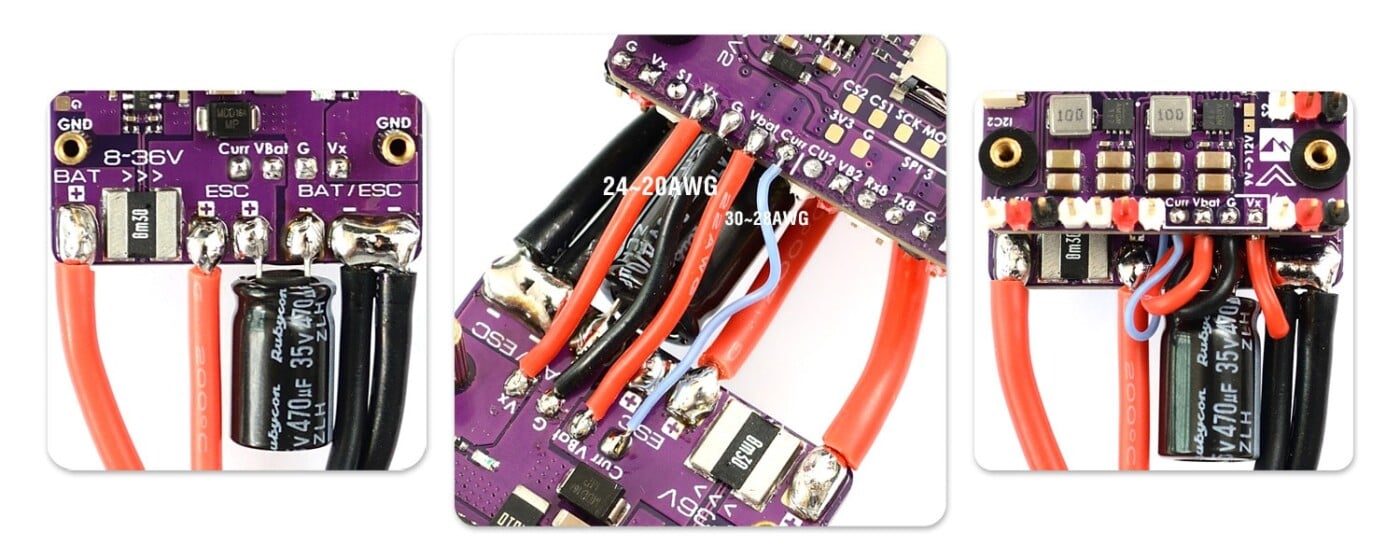
- Plage de tension d'entrée : 8~36V (3~8S LiPo) avec protection TVS
- 2x pastilles d'alimentation ESC
- Capteur de courant : 220A, ADC 3.3V (Échelle 150 en INAV, 66.7 A/V en ArduPilot)
- Résistance de détection : 90A continu, 220A en pointe.
Sortie BEC 5V
- Conçu pour le contrôleur de vol, le récepteur, l'OSD, la caméra, le buzzer, la bande LED 2812, le module GPS, l'anémomètre
- Sortie 5.15 +/- 0.1V DC
- Courant continu 2 Ampères, 3A en pointe
Sortie BEC 9V /12V
- Conçu pour l'émetteur vidéo, la caméra, le cardan, etc.
- Courant continu 2 Ampères, 3A en pointe
- Option 12V avec pastille de cavalier
Sortie BEC Vx
- Conçu pour les servos
- Tension réglable, 5V par défaut, 6V ou 7.2V via cavalier
- Courant continu 8 Ampères, 10A en pointe
Sortie BEC 3.3V
- Régulateur linéaire
- Courant continu : 200mA
Physique
- Montage : 30.5 x 30.5mm, Φ4mm avec œillets Φ3mm
- Dimensions : 54 x 36 x 13 mm
- Poids : 30g avec prolongateur USB
Inclus
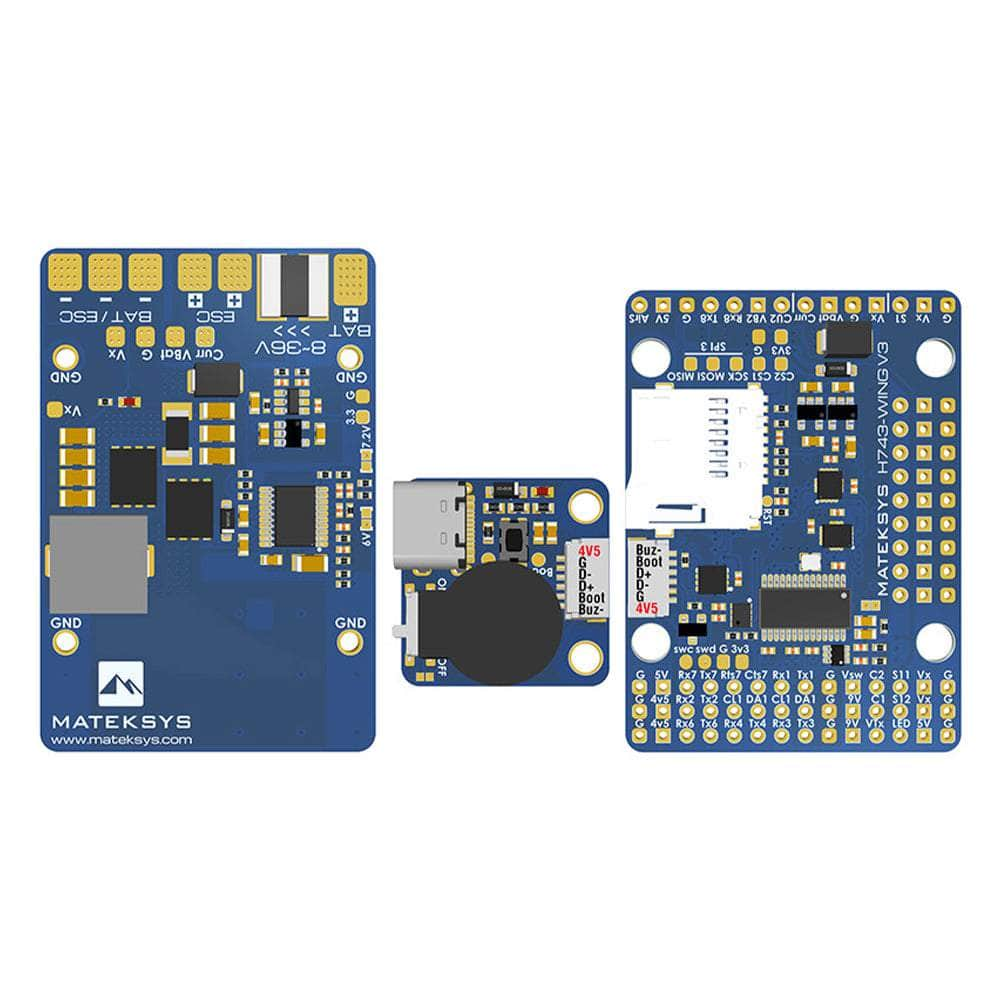
- 1x H743-WING
- 1x Prolongateur USB (Type-C)/Bip (Buzzer passif)
- 1x Câble JST-SH-6P vers JST-SH-6P de 20cm pour prolongateur USB.
- 2x Câble JST-GH-4P vers JST-GH-4P de 20cm pour port CAN & I2C
- 1x Condensateur Rubycon ZLH 35V 470uF
- Broches Dupont 2.54 (La carte est livrée non soudée)
Autres remarques
ArduPilot
- Le H743-WING-V3 avec ICM42605 est pris en charge par ArduPilot 4.1 le plus récent ou plus récent,
- L'ICM42605 est défini comme premier IMU (IMU0), le MPU6000 est le deuxième (IMU1).
- La plage du capteur de courant est de 220A sur le H743-WING-V2, assurez-vous de régler le BATT_AMP_PERVLT à 66.7
- Il est recommandé d'utiliser STM32CubeProgrammer pour effacer le MCU et télécharger le firmware.
- Problème et solution connus, Le pilote automatique H7 ne s'initialise pas avec le firmware Ardupilot
INAV
- La plage du capteur de courant est de 220A sur le H743-WING-V2, assurez-vous de régler le Current Meter Scale à 150
- L'IMU ICM42605 est pris en charge par INAV3.0.2 ou supérieur.
- Le MPU6000 est le premier IMU (IMU0, par défaut), l'ICM42605 est le 3ème IMU (IMU2) dans la cible INAV MATEKH743.
-
Si vous voulez essayer la nouvelle série d'IMU ICM-4. Téléchargez
inav_3.0.2_MATEKH743.hex
- set gyro_to_use = 2
- set acc_hardware = icm42605
- save
- Si vous vous en tenez uniquement au MPU6000, le H743-WING-V2 fonctionne également avec la version stable 3.0.x téléchargée depuis le configurateur.
- Problème connu, La carte SD et le mode MSC pour H743 ne sont pas implémentés.
Autres
- Si les ESC que vous utilisez n'ont pas suffisamment de condensateurs intégrés, un condensateur électrolytique à faible ESR est nécessaire pour réduire le bruit de l'ESC.