





Détails du produit

Caractéristiques et spécifications
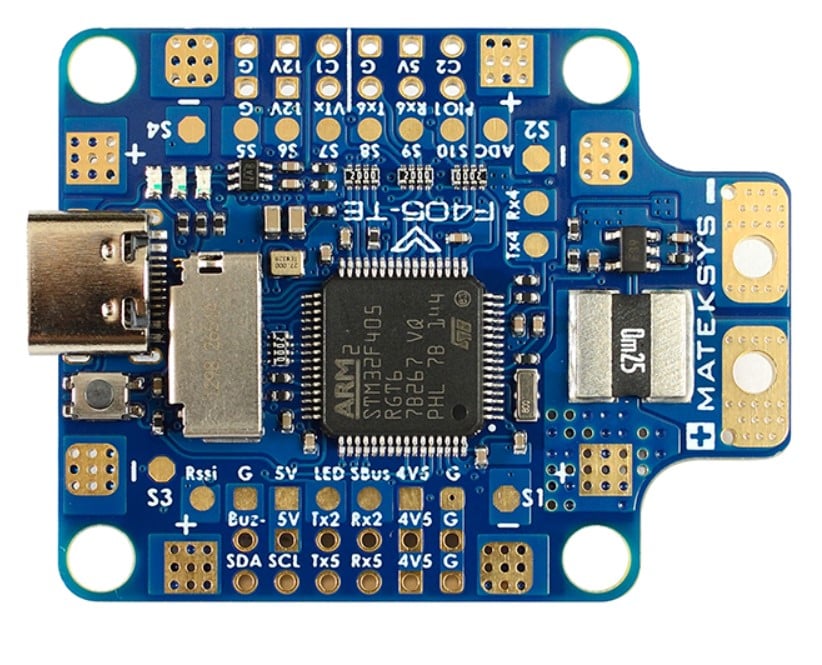
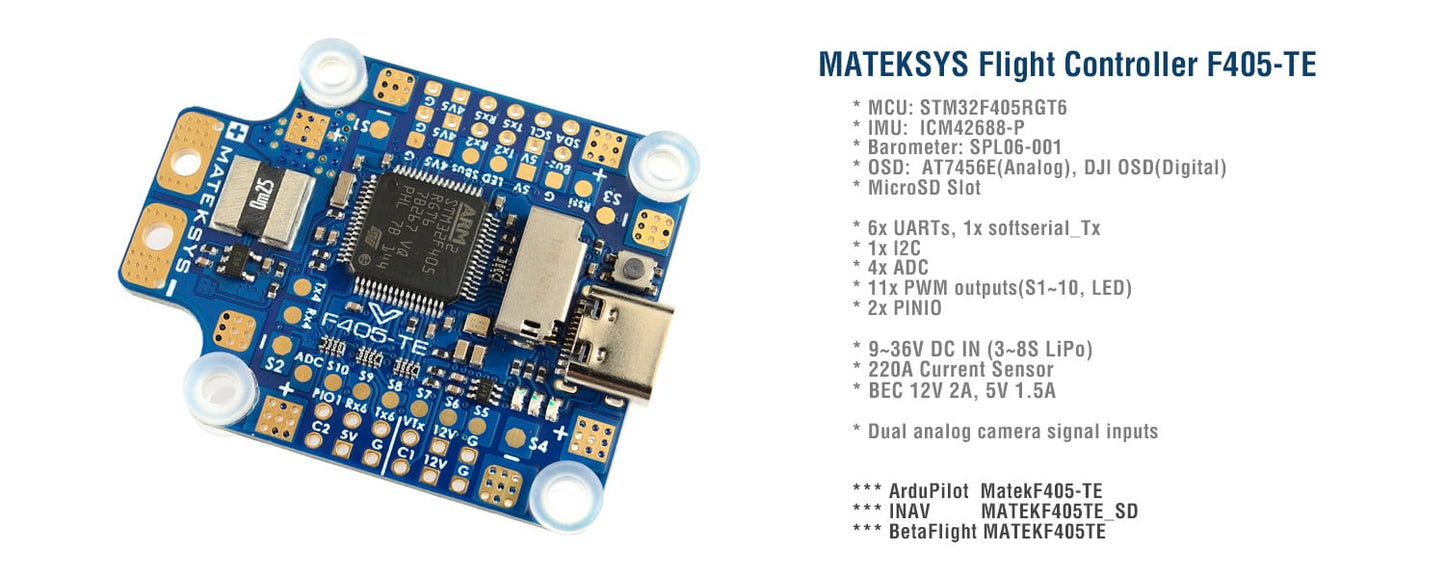
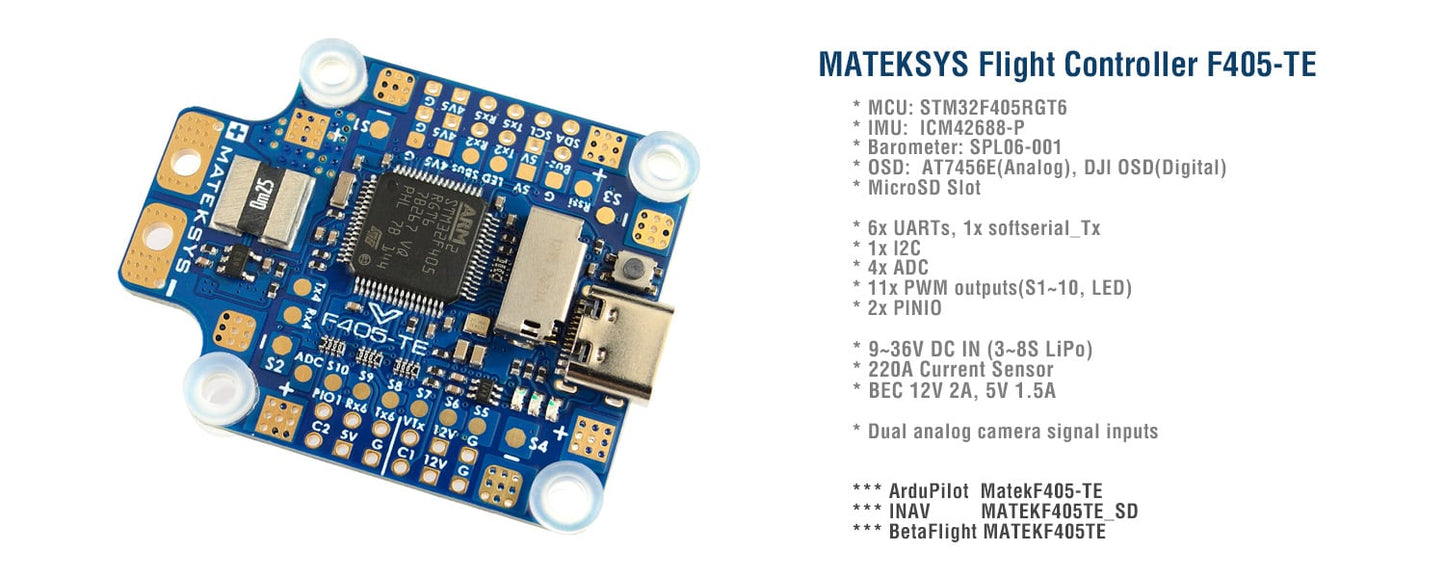
- MCU: 168MHz STM32F405RGT6
- IMU: ICM42688-P (SPI)
- Baro: SPL06-001 (I2C)
- OSD: AT7456E (SPI)
- Boîte noire: emplacement MicroSD (SPI)
- 6x UARTs, 1x option Softserial_Tx (INAV/BF)
- 11x sorties PWM (8x compatibles Dshot avec BF/ArduPilot)
- 1x I2C
- 4x ADC (VBAT, Courant, RSSI, Vitesse de l'air)
- 1x PINIO de rechange
- 4x plots d'alimentation/signal ESC individuels
- 1x Groupe de plots G/S1/S2/S3/S4 pour Signal/GND ESC 4 en 1
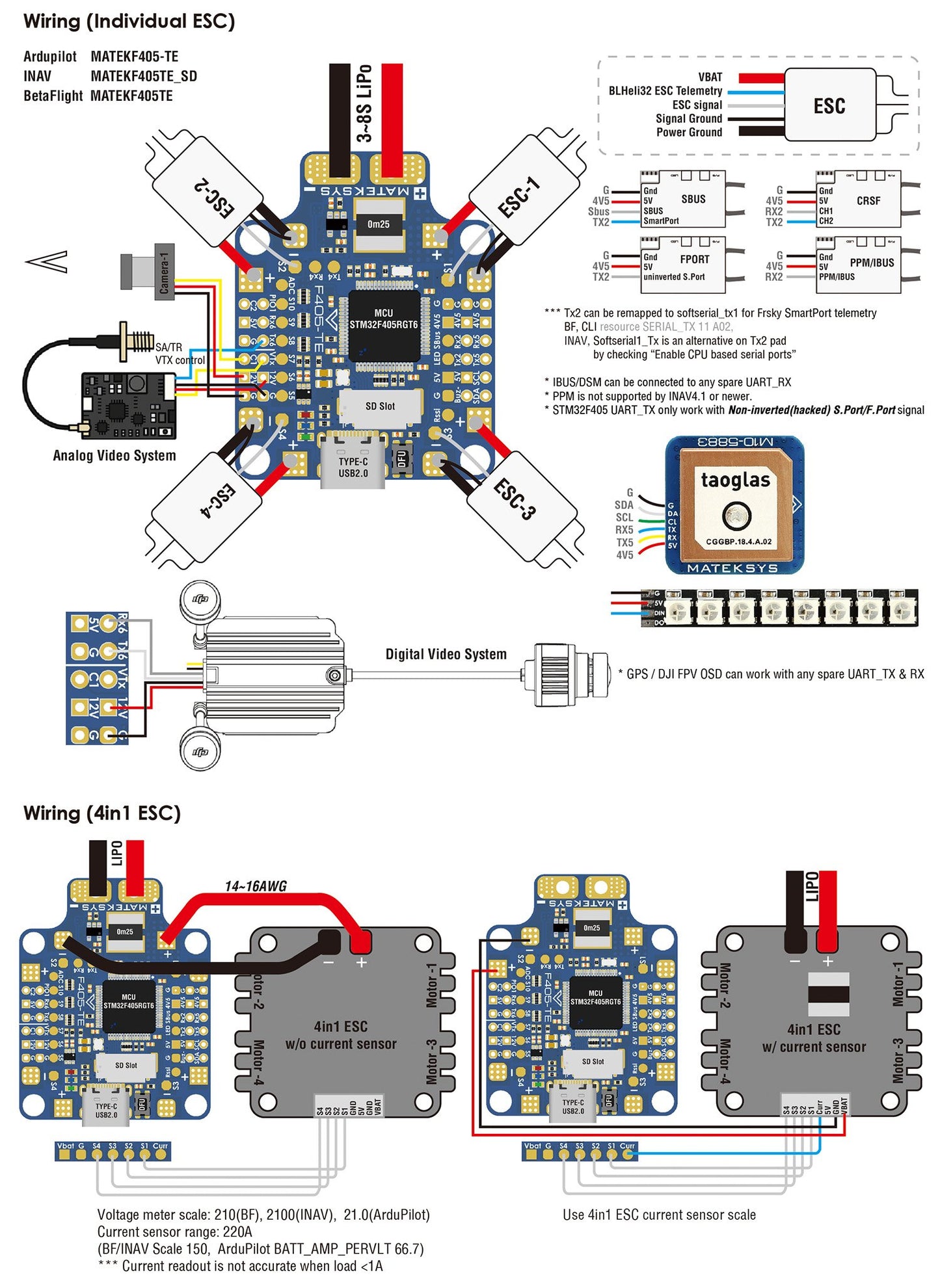
- Inverseur intégré sur UART2-RX pour l'entrée SBUS
- Entrée double caméra commutable
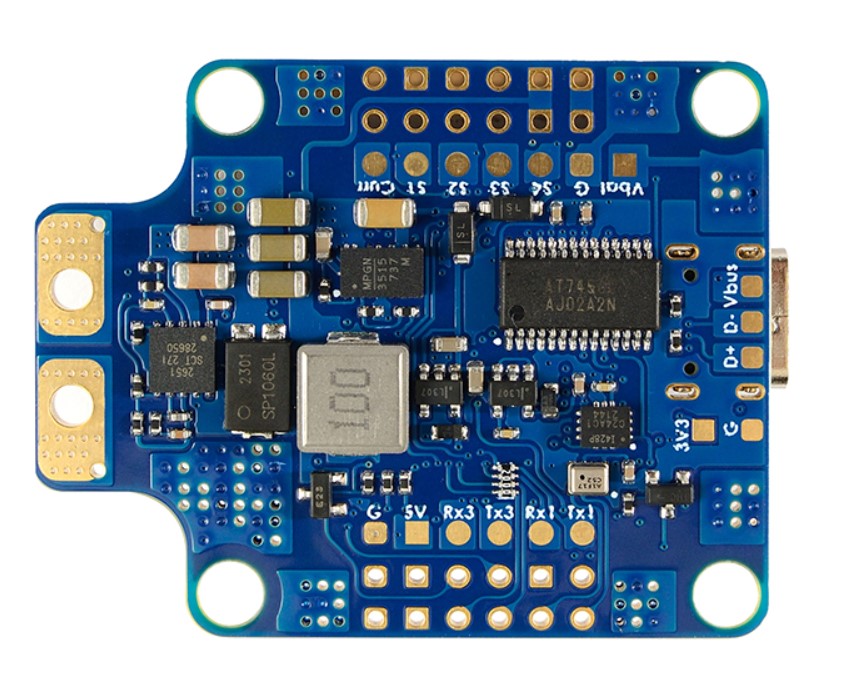
Spécifications PDB
- Entrée: 9~36V (3~8S LiPo)
- PDB: 4x 35A (Max.4x 50A)
- BEC: 5V 1.5A
- BEC: 12V 2A
- LDO 3.3V: 200mA
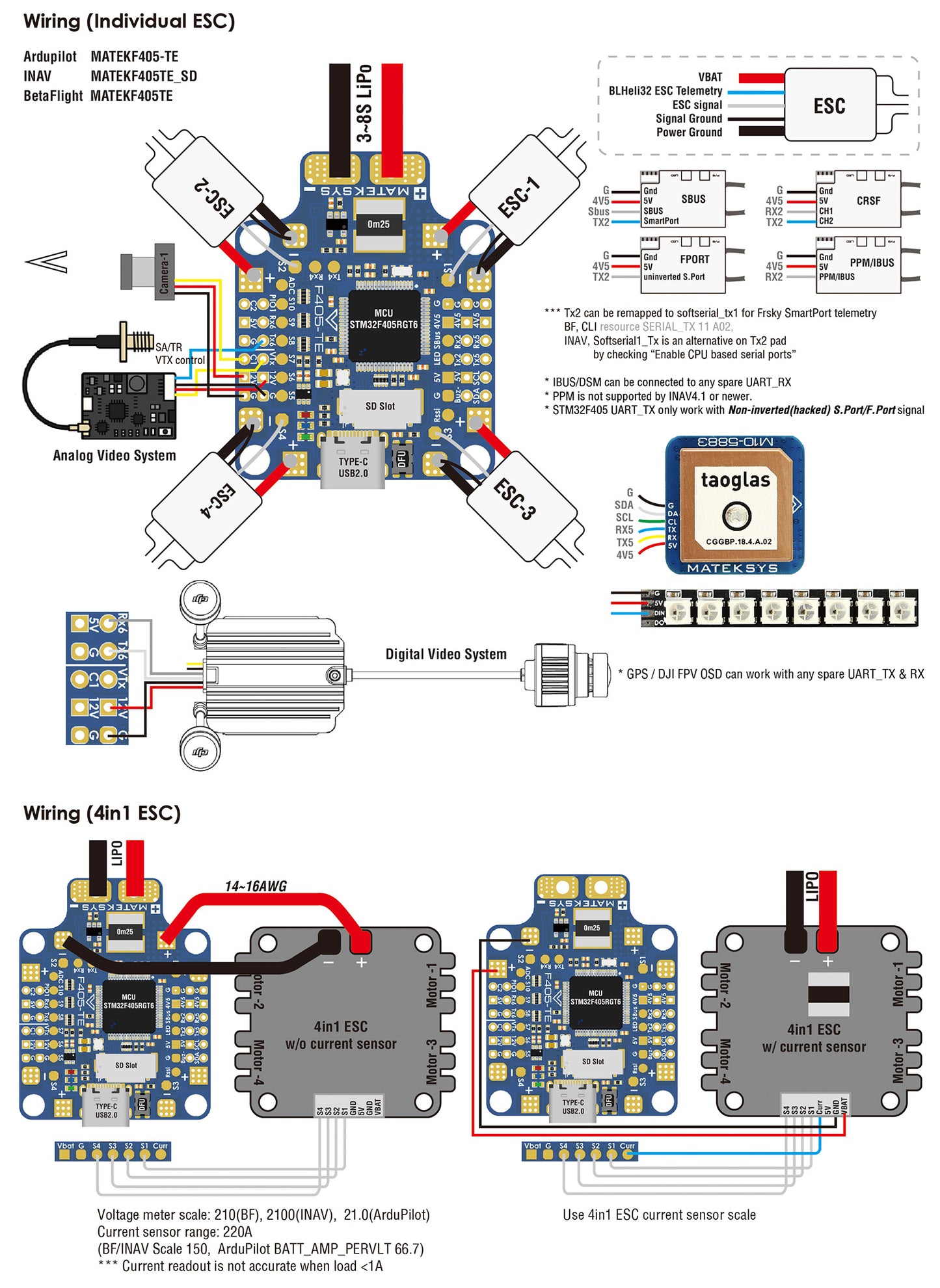
- Capteur de courant: 220A, 3.3V ADC (échelle INAV/BF 150, ArduPilot 66.7 A/V)
- Diviseur de tension de batterie 1K:20K (échelle INAV 2100, échelle BF 210, ArduPilot BATT_VOLT_MULT 21.0)
Firmware
- ArduPilot: MatekF405-TE
- INAV: MATEKF405TE_SD
- BetaFlight: MATEKF405TE
Physique
- Montage: 30.5 x 30.5mm, Φ4mm avec œillets Φ3mm
- Dimensions: 36 x 46 mm
- Poids: 10g
Inclus
- 1x F405-TE
- 6x œillets en silicone M4 à M3
- 1x Rubycon ZLH 35V/470uF (Faible ESR)
Guide de câblage
