





Détails du produit
Caractéristiques
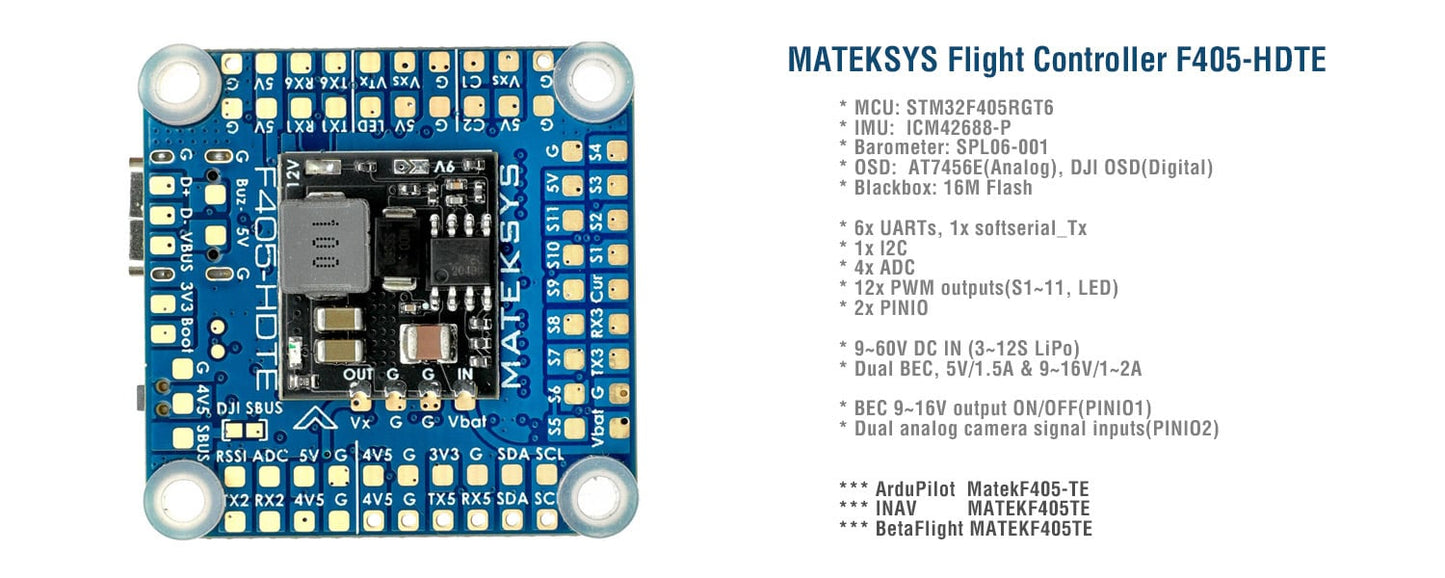
- STM32F405 avec 1 Mo de flash pouvant exécuter ArduPilot/INAV/BetaFlight
- IMU InvenSense de 3ème génération ICM42688-P
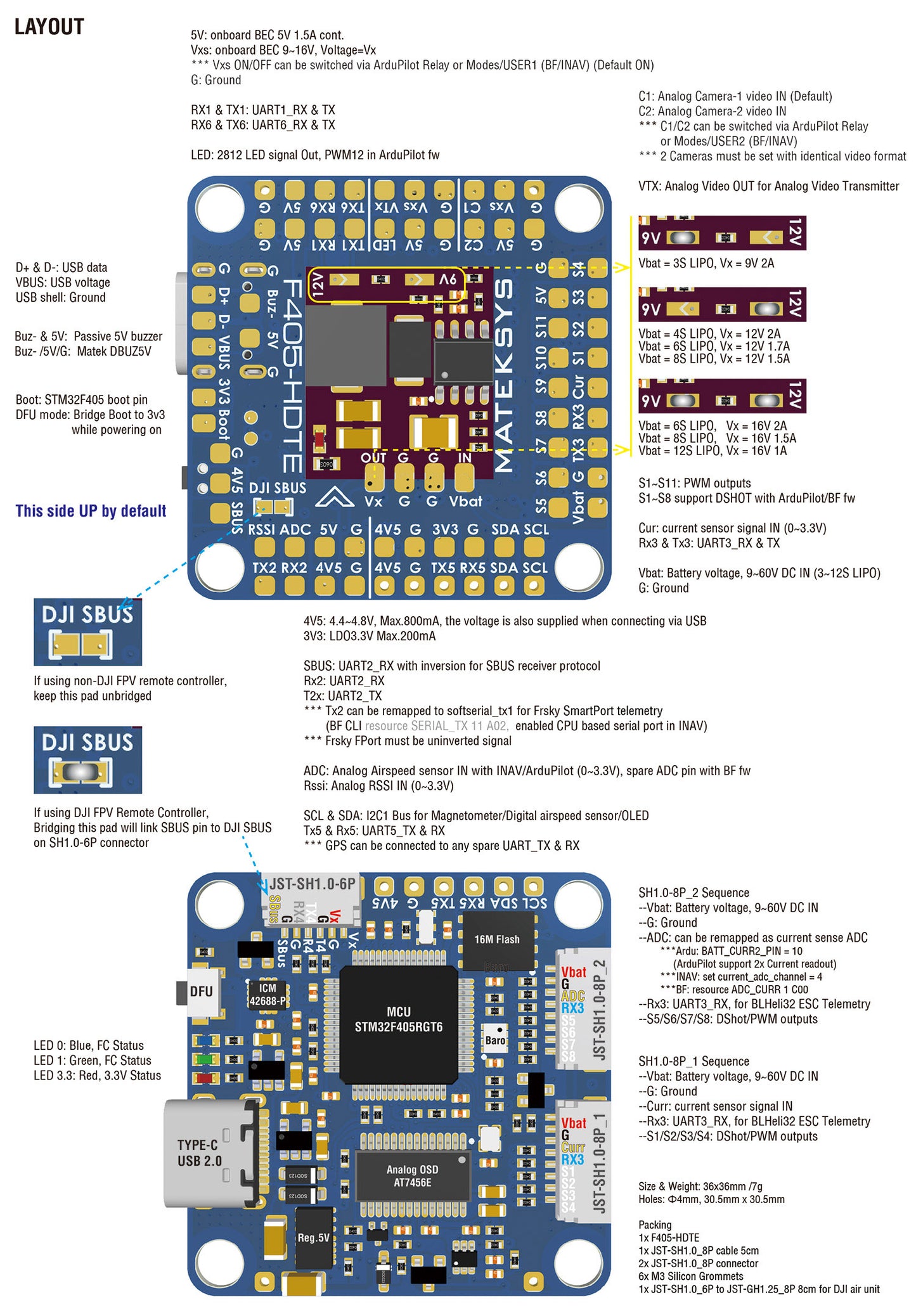
- Tension d'entrée large de 9-60V (3~12S LiPo) et détection de tension. Et un BEC de 9~16V pour DJI OSD ou VTX analogique.
- 8 moteurs + 3 servos dans le mixeur multirotor INAV/BF.
- 2 connecteurs SH1.0_8pin pour PnP avec 2 ESC 4 en 1
- 1 connecteur SH1.0_6pin pour PnP avec système HD (Caddx Vista & Air Unit)
- Brochage USB pour la connexion à un adaptateur USB externe.


Spécifications
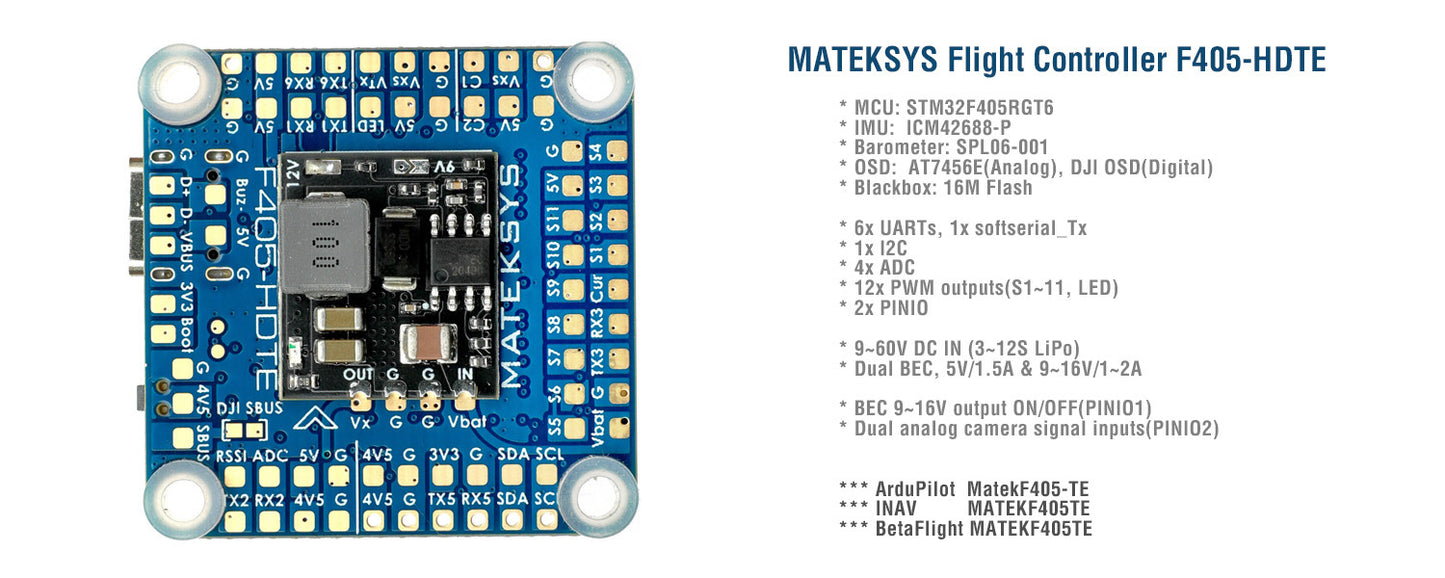
- MCU : STM32F405RGT6
- IMU : ICM42688-P
- OSD : AT7456E, DJI OSD
- Baro : SPL06-001 (I2C)
- Blackbox : mémoire Flash de 16 Mo
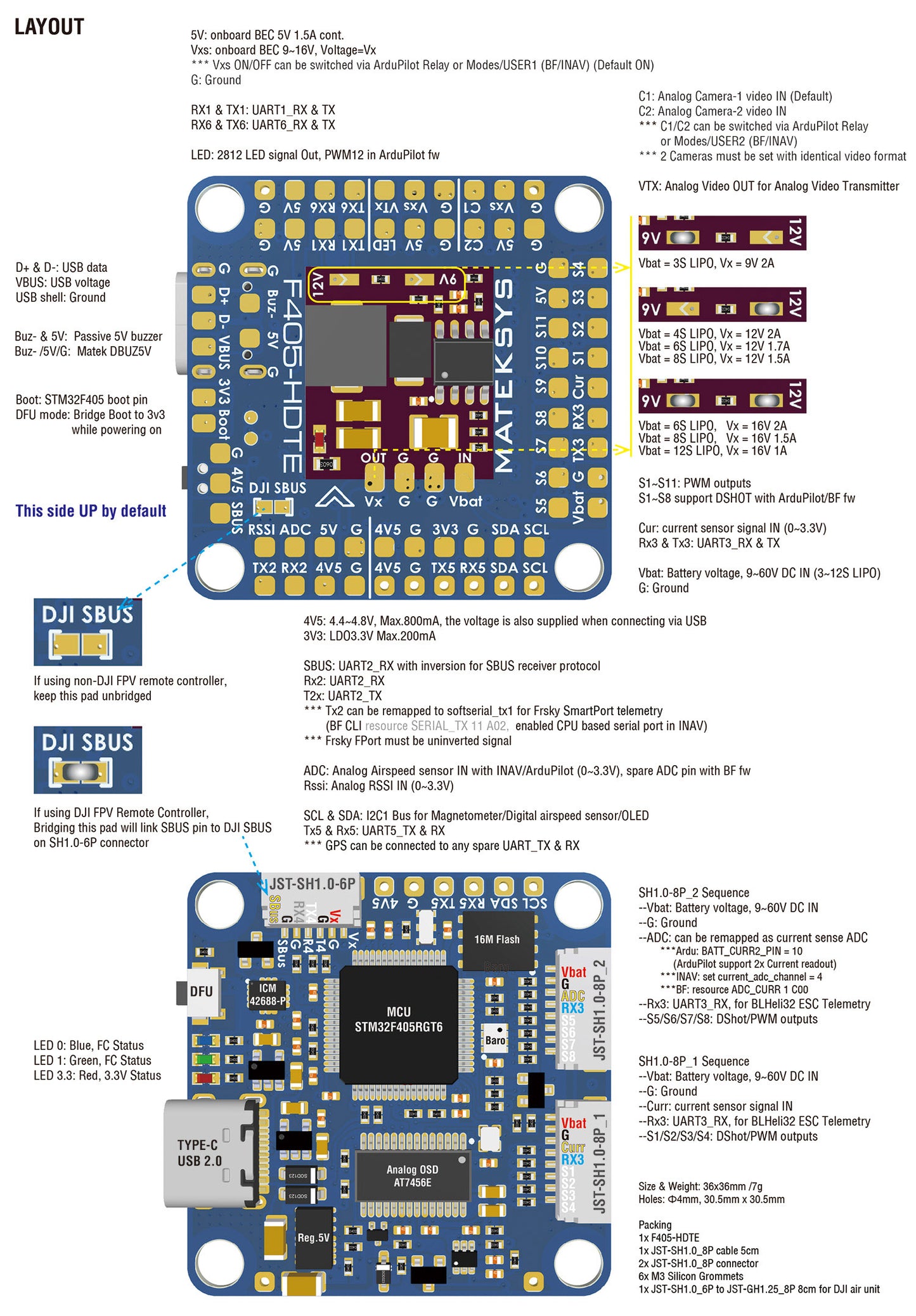
- 6x UART, 1x option Softserial_Tx
- 12x sorties PWM (8x Dshot)
- 1x I2C
- 4x ADC (VBAT, Courant, RSSI, Vitesse air)
- 2x PINIO
- 2 connecteurs SH1.0_8pin pour ESC 4 en 1
- 1 connecteur SH1.0_6pin pour système HD (Caddx Vista & Air Unit)
- 3x LED pour l'état du FC (Bleu, Vert) et indicateur 3.3V (Rouge)
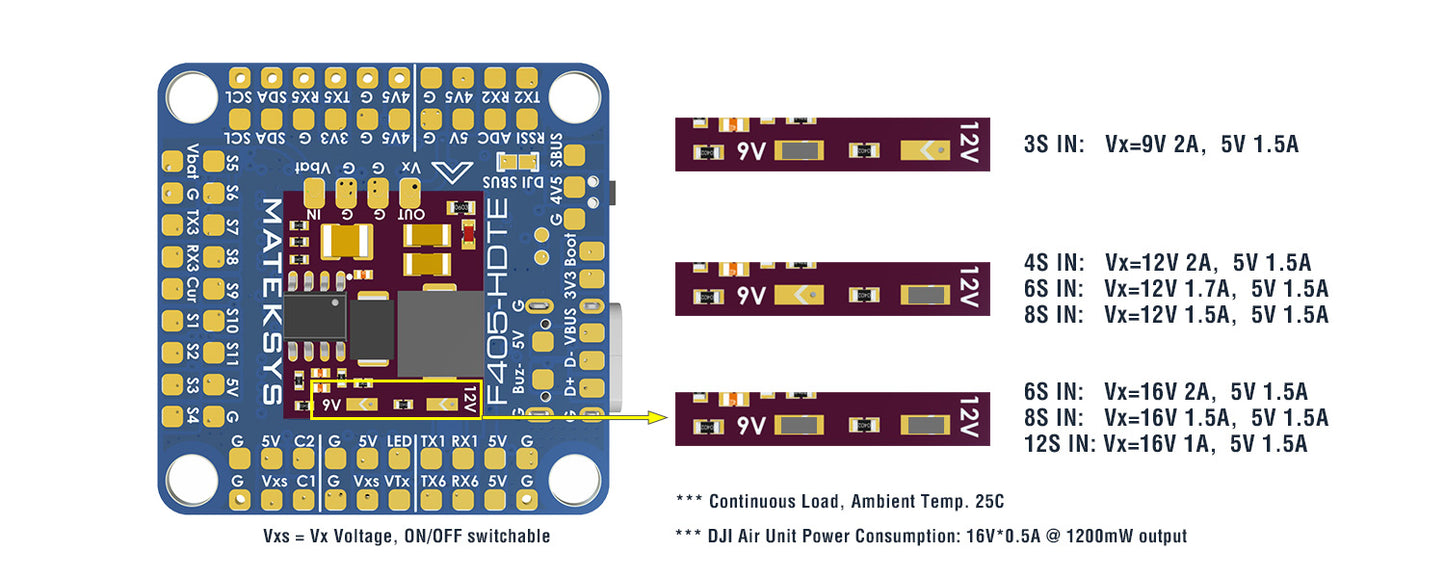
- Sortie 9~16V (Vxs) commutable ON/OFF
- Double signal de caméra analogique commutable
Alimentation
- Entrée : 9~60V (3~12S LiPo)
- BEC : 5V 1.5A
- BEC : Vx, 9~16V/1~2A (3S IN/9V 2A, 4S IN/12V 2A, 6S IN/16V 2A, 8S IN/16V 1.5A, 12S IN/16V 1A)
- Capteur de tension de batterie : 1K:20K (échelle INAV 2100, échelle BF 210)
- Pas de capteur de courant intégré, prend en charge le capteur de courant externe du PDB/4in1
Firmware
- ArduPilot : MatekF405-TE
- INAV : MATEKF405TE
- BetaFlight : MATEKF405TE
Physique
- Montage : 30.5 x 30.5mm, Φ4mm avec œillets Φ3mm
- Dimensions : 36 x 36 x 5 mm
- Poids : 7g
Inclus
- 1x FC F405-HDTE
- 6x Œillets en silicone M4 à M3
- 1x câble SH1.0_8pin 5cm, 2x connecteurs SH1.0_8pin
- 1x câble SH1.0_6pin vers GH1.25_8pin 8cm pour système HD (Caddx Vista & Air Unit)