











Détails du produit
Le capteur de vitesse anémométrique numérique Matek ASPD-DLVR est doté d'un connecteur CAN JST-GH, d'un protocole UAVCAN UART1, UART2, UART13 et de nombreuses autres fonctionnalités intéressantes !

- Spécifications et caractéristiques
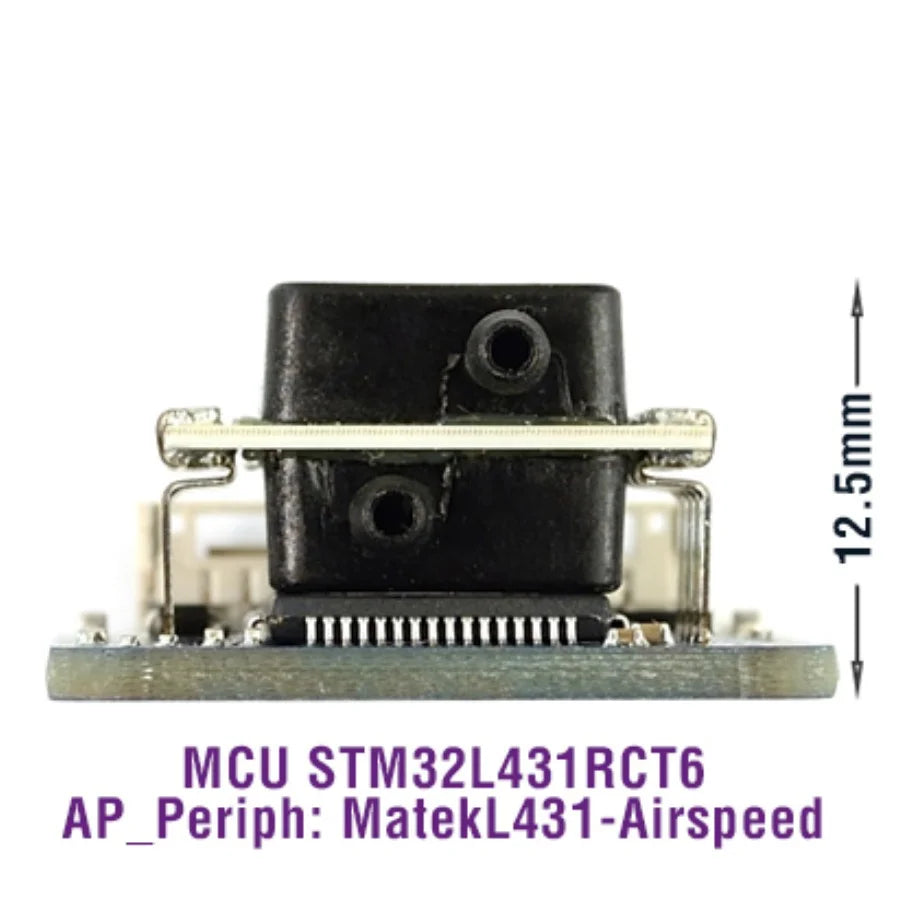
- Nœud CAN ArduPilot AP_Periph F303
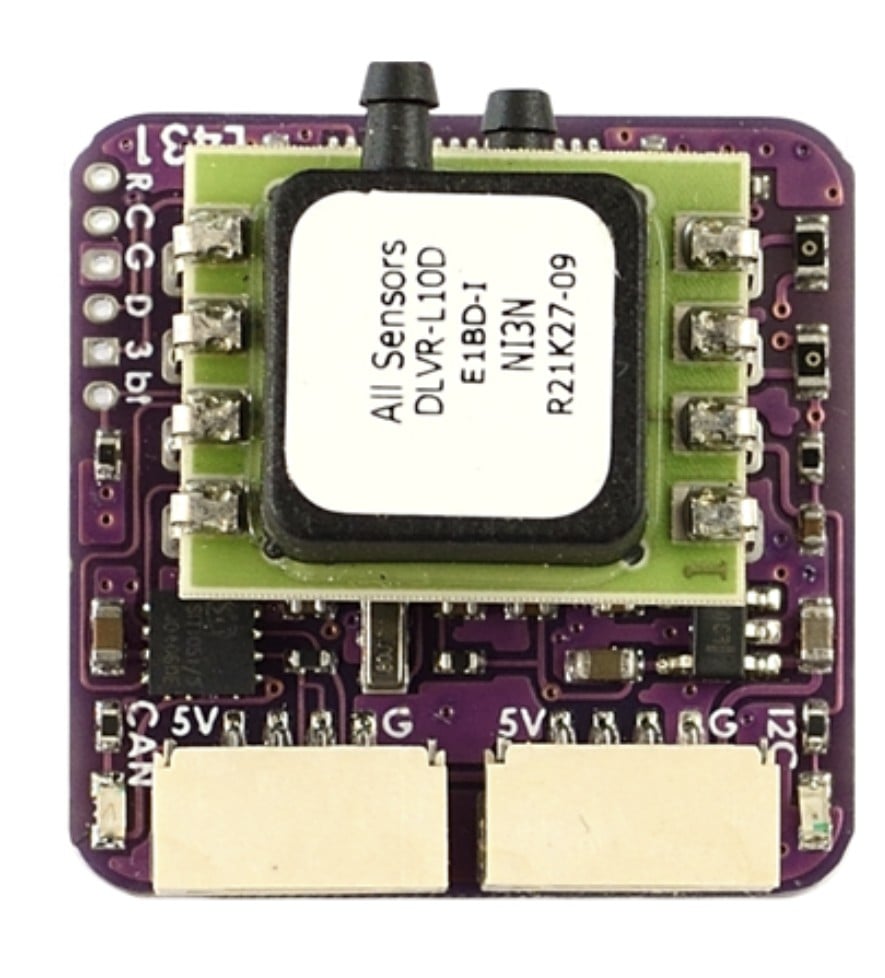
- Tous capteurs DLVR-L10D, plage de température industrielle
- Interface CAN et I2C
- Plateformes typiques : Aile fixe, QuadPlane, VTOL
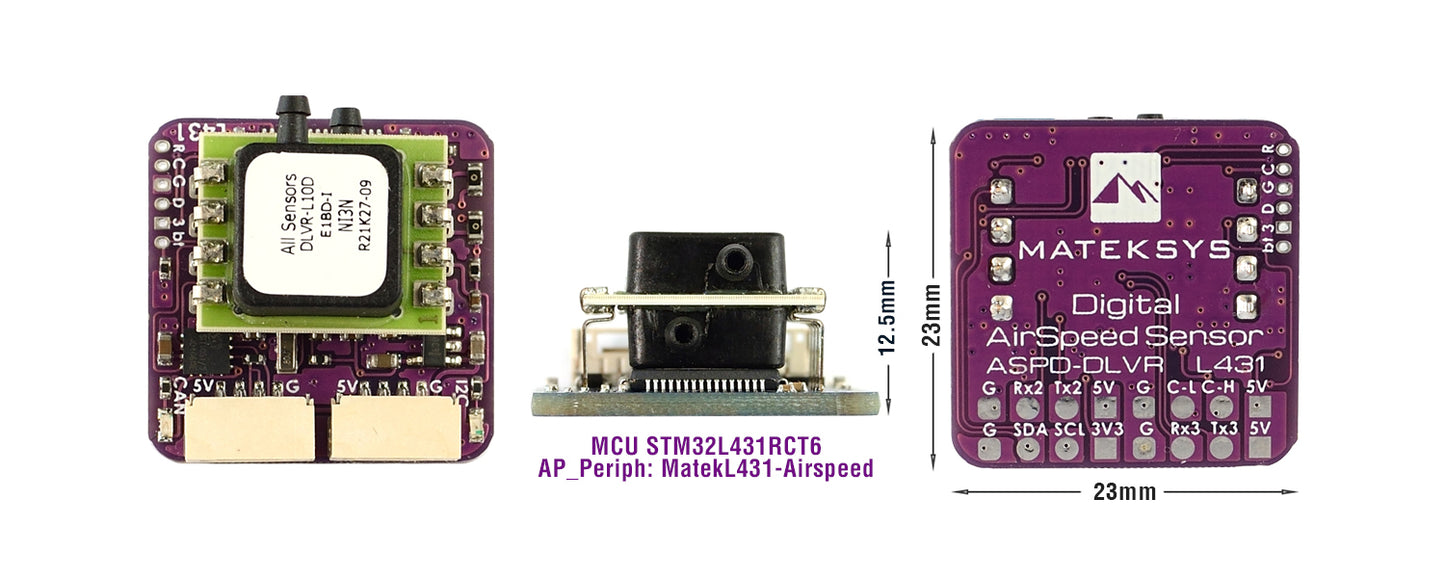
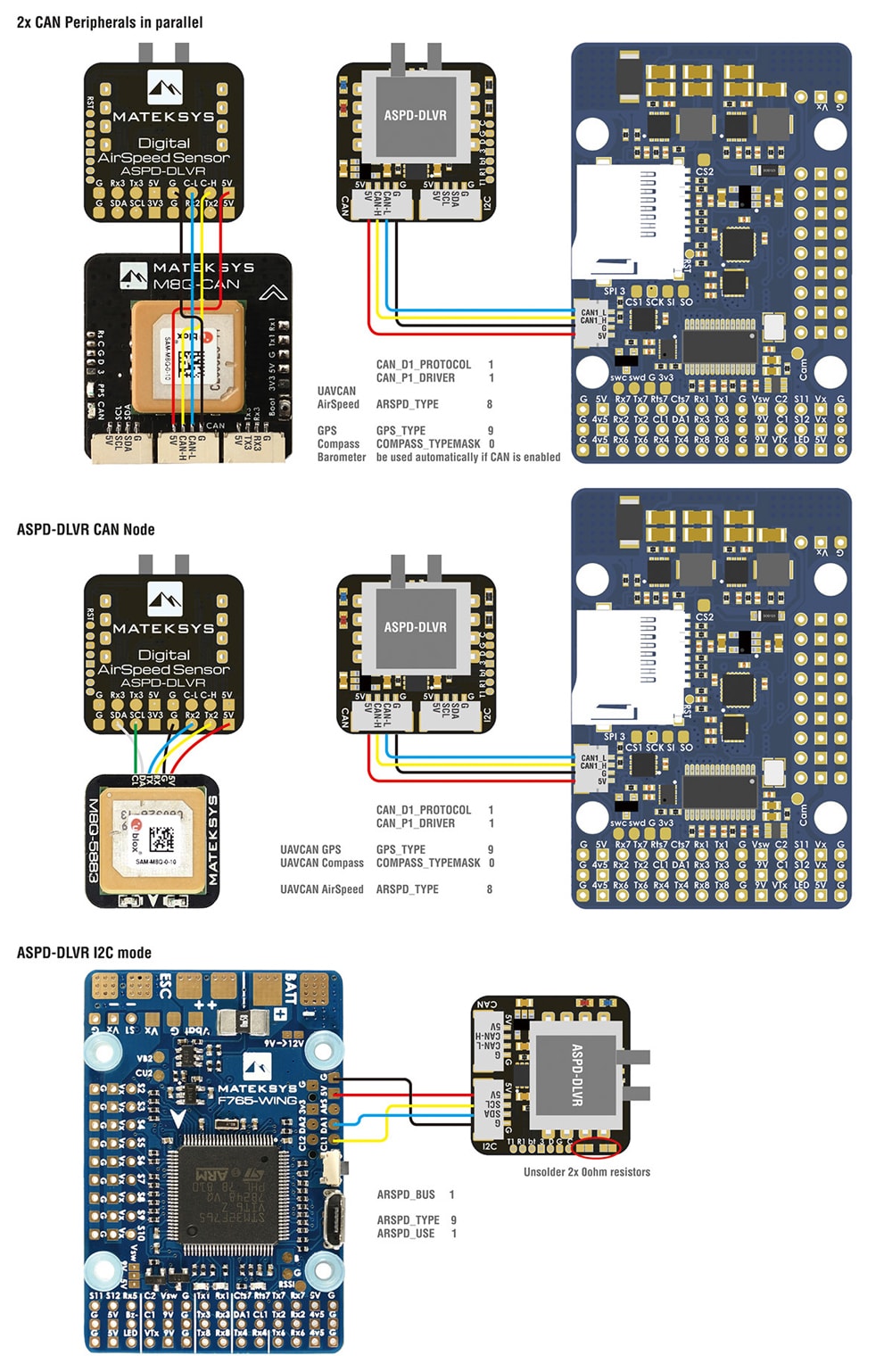
- Connecteur CAN JST-GH, Protocole UAVCAN
- Connecteur I2C JST-GH, mode I2C DLVR-L10D (adresse I2C 0x28)
- UART1, Mise à jour du micrologiciel
- UART2, Rechange pour GPS externe
- UART3, Protocole MSP (à prendre en charge)
- LED du chargeur de démarrage CAN, bleue
-
- Clignotement rapide, Pas de communication entre le nœud CAN et les contrôleurs de vol
- Clignotement lent, Communication entre le nœud CAN et les contrôleurs de vol
Spécifications
- LED d'alimentation 3,3 V, rouge
- Plage de tension d'entrée : 4~6V
- Consommation électrique : 60mA
- Températures de fonctionnement : -20°C à 85°C
- Plage de pression : 2500Pa (± 10 inH2O)
- Pression d'éclatement : 75kPa
- Plage de vitesse : ±250 km/h
- 22mm*22mm*12.5mm
- 4g
Schéma de câblage

Comprend
- 1 x ASPD-DLVR
- 2 x JST-GH-4P à JST-GH-4P fil de silicone 20cm