










Détails du produit
Le Kotleta 20 est un contrôleur de bus Can avancé pour moteurs BLDC sans capteur, conçu pour des applications autonomes utilisant
le protocole UAVcan
tel que les systèmes Pixhawk et PX4.
Ses principaux domaines d'application incluent les systèmes de propulsion d'aéronefs et d'engins aquatiques électriques sans pilote. Le contrôleur Kotleta 20 ESC utilise
Sapog
- un firmware open source multiplateforme pour contrôleurs BLDC développé par Zubax Robotics.

Caractéristiques
- Excellentes caractéristiques dynamiques.
- Freinage régénératif et roue libre active.
- Puissance continue de 500 W pour un poids de 8,8 g.
- Boucle de contrôle de régime optionnelle (régulateur de régime).
- Auto-diagnostics et rapports d'état de santé.
- Hautement configurable.
- Faible bruit et faible ondulation de courant grâce aux condensateurs de filtrage embarqués à faible ESR et au PWM haute fréquence.
-
Interfaces prises en charge :
- CAN (ISO 11898-2)
- UART.
- RCPWM (interface PWM analogique largement utilisée en robotique).
- Assurance qualité élevée :
- Protection contre la production non autorisée (contrefaçon) au moyen d'une signature numérique installée sur chaque unité fabriquée.
- Firmware open source - Sapog (licence BSD à 3 clauses).
Ressources
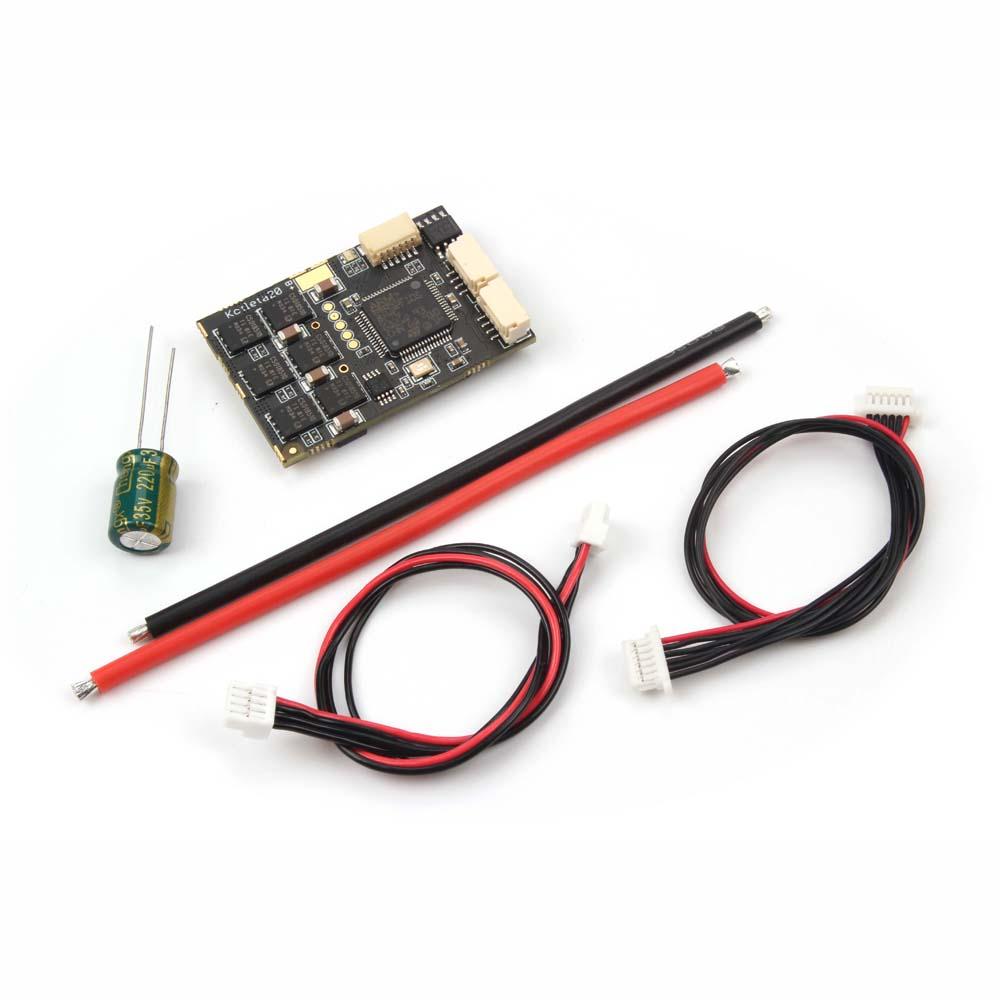
Contenu du kit (ESC simple)
- 1 x Kotleta 20 ESC (Combo)
- 1 x Fils de 100 mm de long 16 AWG (Rouge)
- 1 x Fils de 100 mm de long 16 AWG (Noir)
- 1 x Condensateur électrolytique : 220uF 35v
- 1 x Câble 4 vers 4 broches (CAN)
- 1 x Câble 6 vers 6 broches (Debug)
- 1 x Bouchon de terminaison micro
Contenu du kit (pack de 4)
- 4 x Kotleta 20 ESC (Combo)
- 4 x Fils de 100 mm de long 16 AWG (Rouge)
- 4 x Fils de 100 mm de long 16 AWG (Noir)
- 4 x Condensateur électrolytique : 220uF 35v
- 4 x Câble 4 vers 4 broches (CAN)
- 1 x Câble 6 vers 6 broches (Debug)
- 1 x Bouchon de terminaison micro