































Détails du produit
À l'intérieur du Pixhawk® 6X, vous trouverez un STM32H753 basé sur STMicroelectronics® associé à une technologie de capteurs de Bosch® et InvenSense®, vous offrant flexibilité et fiabilité pour le contrôle de tout véhicule autonome, adapté aux applications académiques et commerciales.
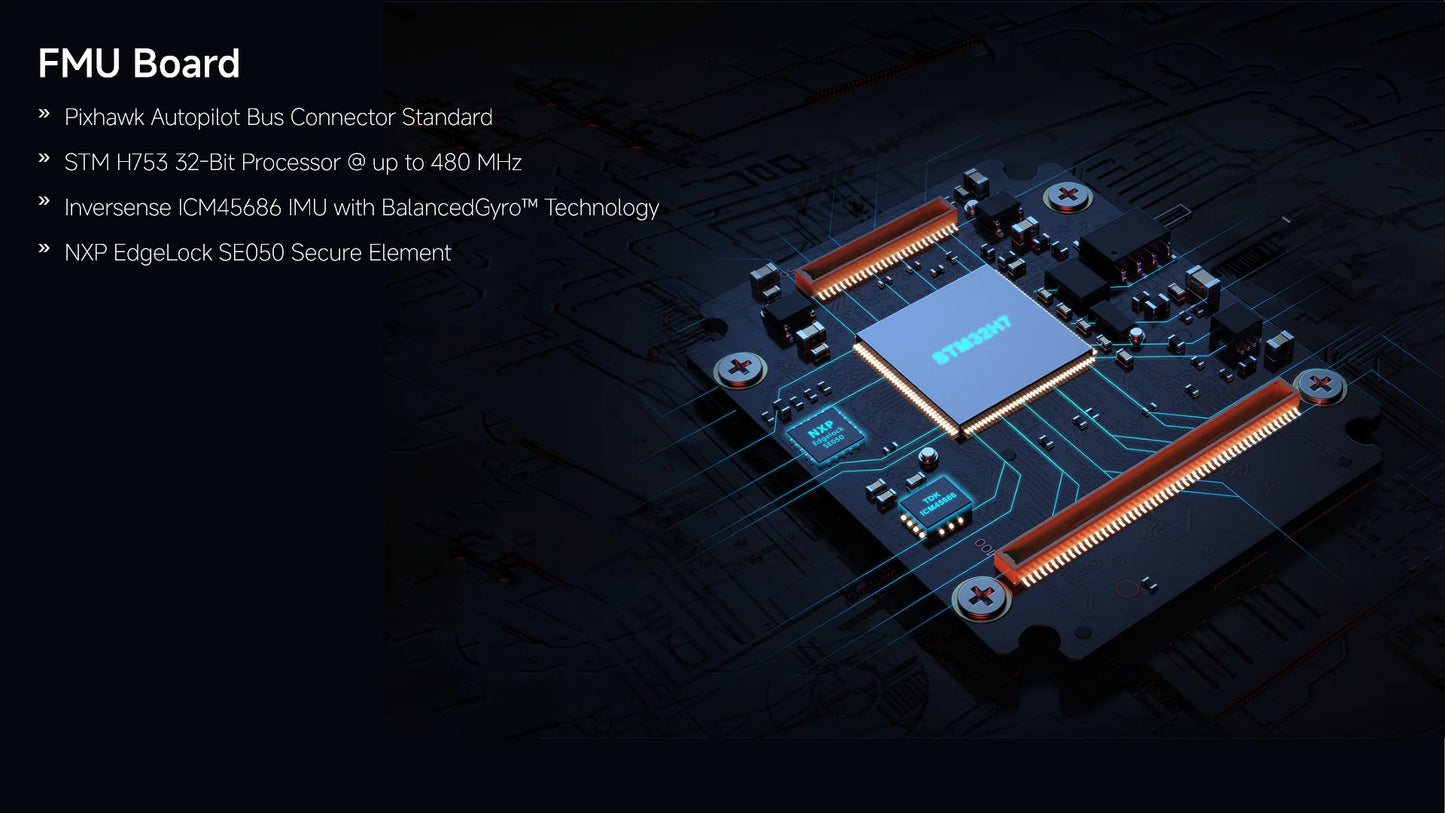
Le microcontrôleur H7 du Pixhawk® 6X contient le cœur Arm® Cortex®-M7 cadencé jusqu'à 480 MHz, dispose de 2 Mo de mémoire flash et de 1 Mo de RAM. Le pilote automatique PX4 tire parti de la puissance et de la RAM accrues. Grâce à la puissance de traitement améliorée, les développeurs peuvent être plus productifs et efficaces dans leur travail de développement, permettant des algorithmes et des modèles complexes.
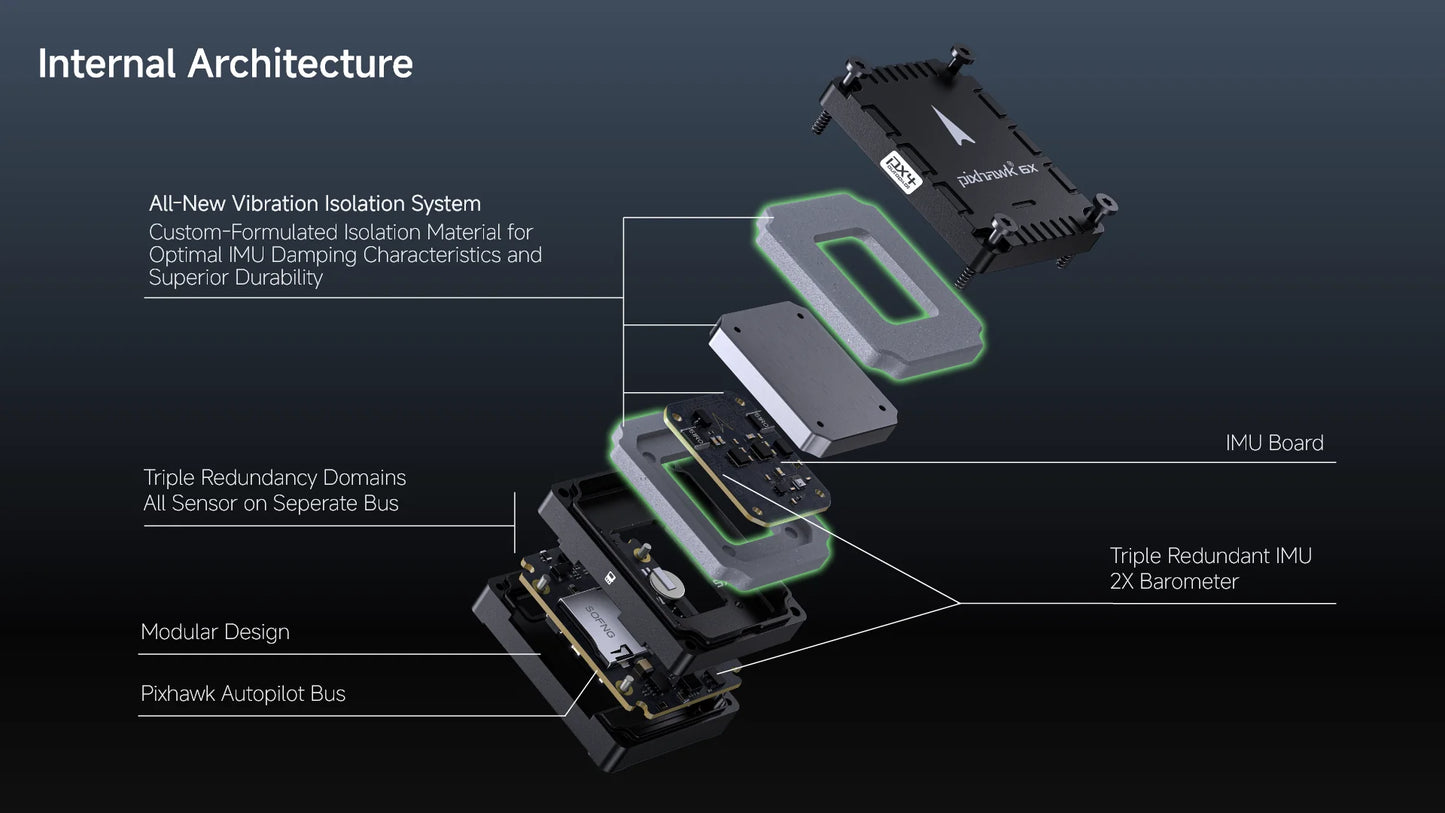
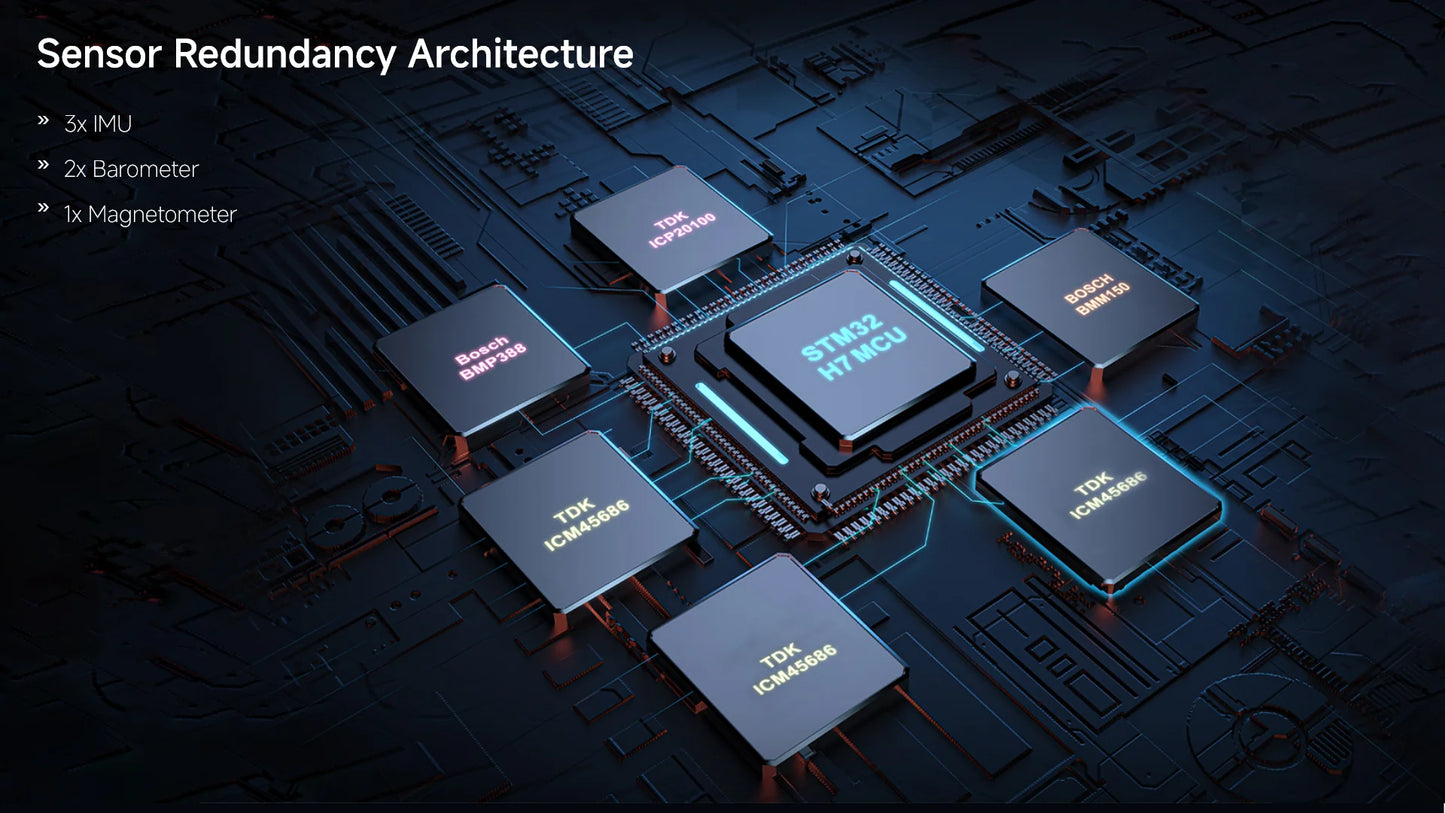
La norme ouverte FMUv6X comprend des IMU hautes performances et à faible bruit, conçues pour une meilleure stabilisation. IMU triple redondance et baromètre double redondance sur des bus séparés. Lorsque le pilote automatique PX4 détecte une défaillance de capteur, le système bascule de manière transparente vers un autre pour maintenir la fiabilité du contrôle de vol.
Un LDO indépendant alimente chaque ensemble de capteurs avec un contrôle de puissance indépendant. Un système d'isolation des vibrations pour filtrer les vibrations à haute fréquence et réduire le bruit afin d'assurer des lectures précises, permettant aux véhicules d'atteindre de meilleures performances de vol globales.
Le bus de capteurs externe (SPI5) dispose de deux lignes de sélection de puce et de signaux de données prêts pour des capteurs et une charge utile supplémentaires avec interface SPI, et avec un PHY Ethernet Microchip intégré, une communication à grande vitesse avec les ordinateurs de mission via Ethernet est désormais possible.
Le Pixhawk® 6X est parfait pour les développeurs des laboratoires de recherche d'entreprise, les startups, les universitaires (recherche, professeurs, étudiants) et les applications commerciales.







La version Rev 8 est prise en charge dans la version PX4 1.14.3 ou ultérieure, ainsi que la version stable Ardupilot 4.5.0 ou ultérieure. Elle est livrée avec le micrologiciel PX4 par défaut. L'utilisateur peut également utiliser le micrologiciel Ardupilot en flashant le micrologiciel via Mission Planner ou QGroundControl.
Caractéristiques
- Processeur STM32H753 haute performance
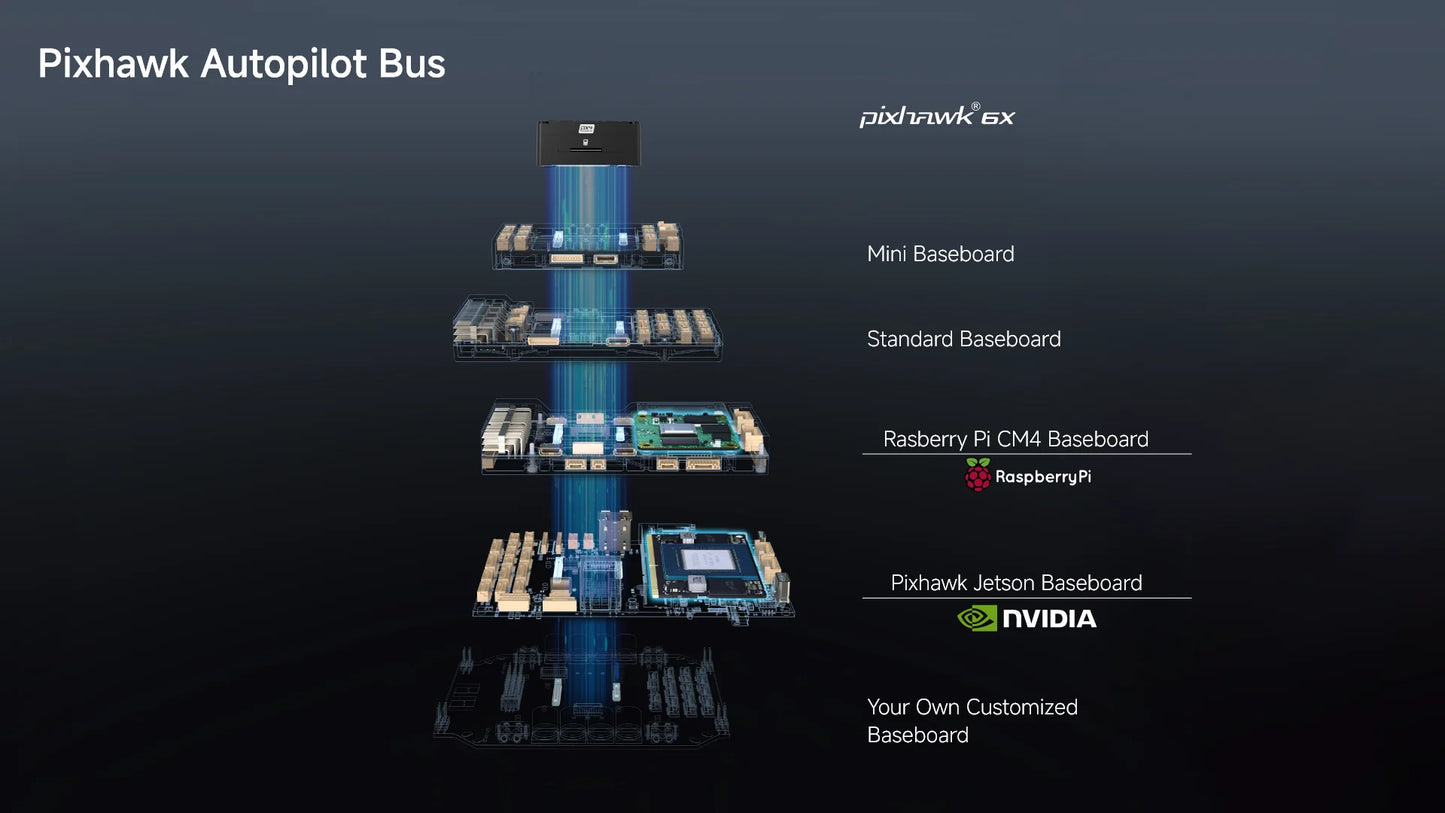
- Contrôleur de vol modulaire : IMU, FMU et système de base séparés, connectés par un connecteur de bus pilote automatique Pixhawk® à 100 broches et un à 50 broches.
- Redondance : 3 capteurs IMU et 2 capteurs barométriques sur des bus séparés
- Domaines de triple redondance : Domaines de capteurs complètement isolés avec des bus séparés et un contrôle d'alimentation séparé
- Système d'isolation des vibrations nouvellement conçu pour filtrer les vibrations à haute fréquence et réduire le bruit afin d'assurer des lectures précises
- Interface Ethernet pour une intégration rapide de l'ordinateur de mission
- Les IMU sont régulés en température par des résistances chauffantes embarquées, permettant une température de fonctionnement optimale des IMU
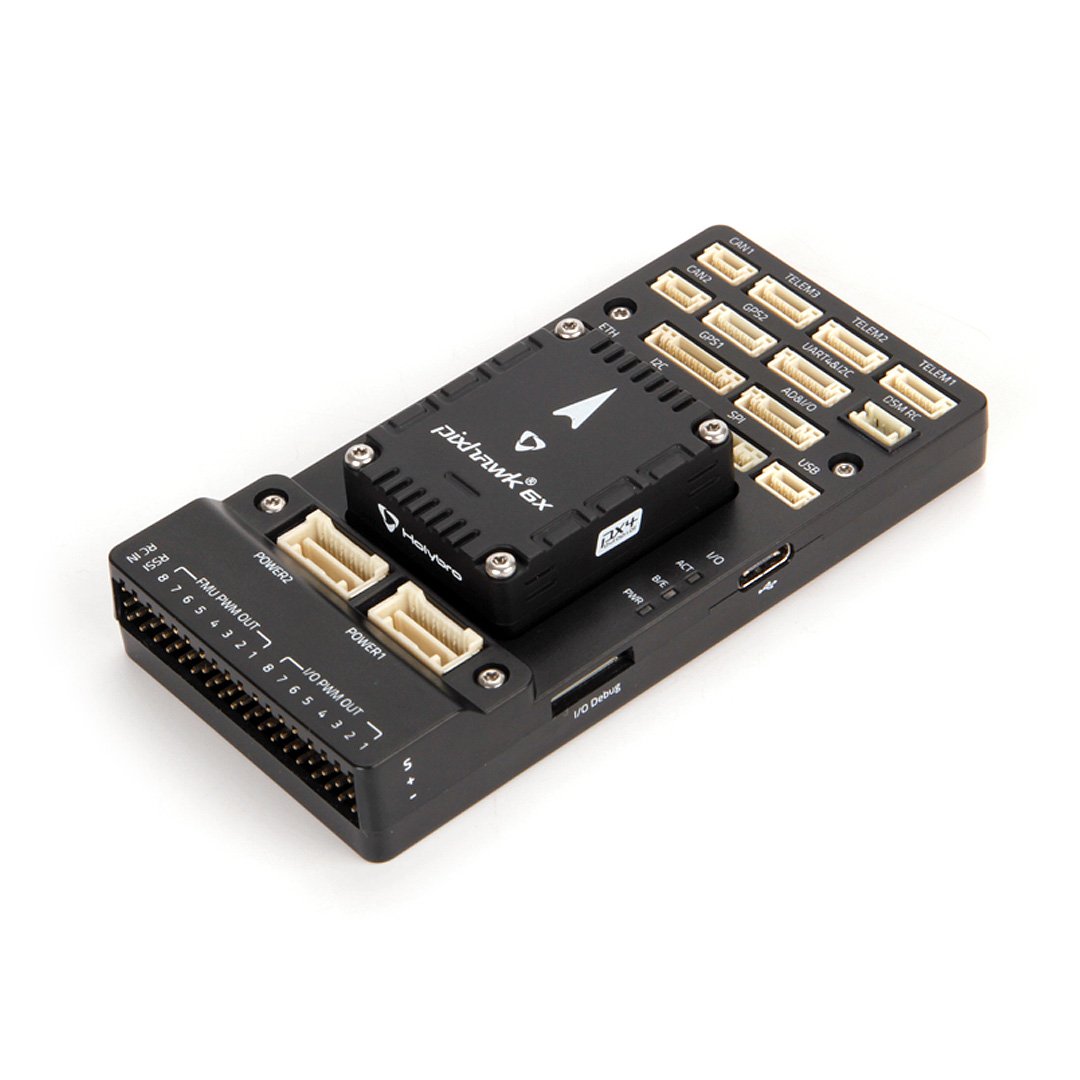
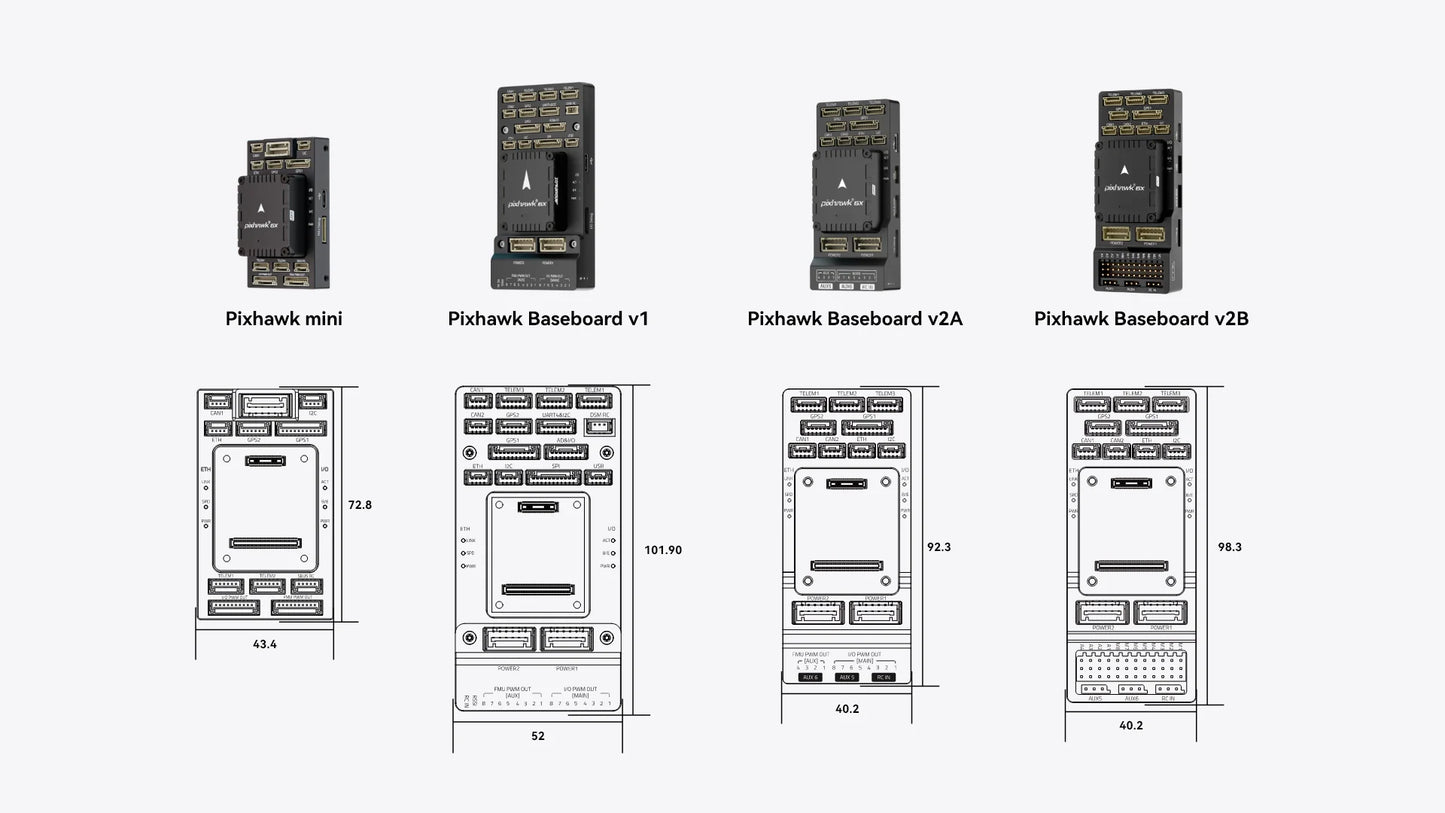
Pixhawk Baseboard v1 vers v2
- La carte de base Pixhawk v1 a été remplacée par les versions v2A et v2B, avec les mises à jour suivantes :
- Conception plus petite et plus compacte : l'encombrement global de la carte a été réduit, ce qui facilite son intégration dans diverses applications.
- Nouvelle conception de connecteur robuste : fiabilité améliorée avec un boîtier de connecteur amélioré.
- Ajout d'un décaleur de niveau PWM : permet de commuter les niveaux de signal de sortie PWM de 3,3 V à 5 V via une résistance.
- Changement vers un boîtier CNC en aluminium : le boîtier extérieur CNC en aluminium de haute qualité offre durabilité, dissipation thermique efficace, résistance à la corrosion, esthétique et blindage EMI.
- Deux modèles disponibles : modèle A et modèle B, chacun avec les broches orientées dans des directions différentes pour plus de flexibilité d'installation.
- Déplacement des ports : les ports UART4 & I2C, SPI, AD & IO, DSM RC et JST USB ont été déplacés du haut vers le côté de la carte. AUX7, AUX8 et SBUS_OUT/RSSI_IN sont déplacés sur le côté dans un port JST-GH.
Spécifications
- Processeur FMU : STM32H753
- 32 bits Arm® Cortex®-M7, 480 MHz, 2 Mo de mémoire flash, 1 Mo de RAM
- Processeur E/S : STM32F100
- 32 bits Arm® Cortex®-M3, 24 MHz, 8 Ko de SRAM
- Capteurs intégrés
- 3 capteurs IMU ICM-45686 (±32 g) avec technologie BalancedGyro™
- Mag : BMM150
- Baromètre : 2x BMP388
Données électriques
- Tensions nominales :
- Tension d'entrée maximale : 6 V
- Entrée d'alimentation USB : 4,75 ~ 5,25 V
- Entrée de rail servo : 0 ~ 36 V
- Courants nominaux :
- Limiteur de courant de sortie Telem1 : 1,5 A
- Limiteur de courant de sortie combiné de tous les autres ports : 1,5 A
Dimensions
-
Dimensions
- Module contrôleur de vol : 38,8 x 31,8 x 14,6 mm
- Carte de base standard : 52,4 x 103,4 x 16,7 mm
- Mini carte de base : 43,4 x 72,8 x 14,2 mm
-
Poids
- Module contrôleur de vol : 23 g
- Carte de base standard : 51 g
- Mini carte de base : 26,5 g
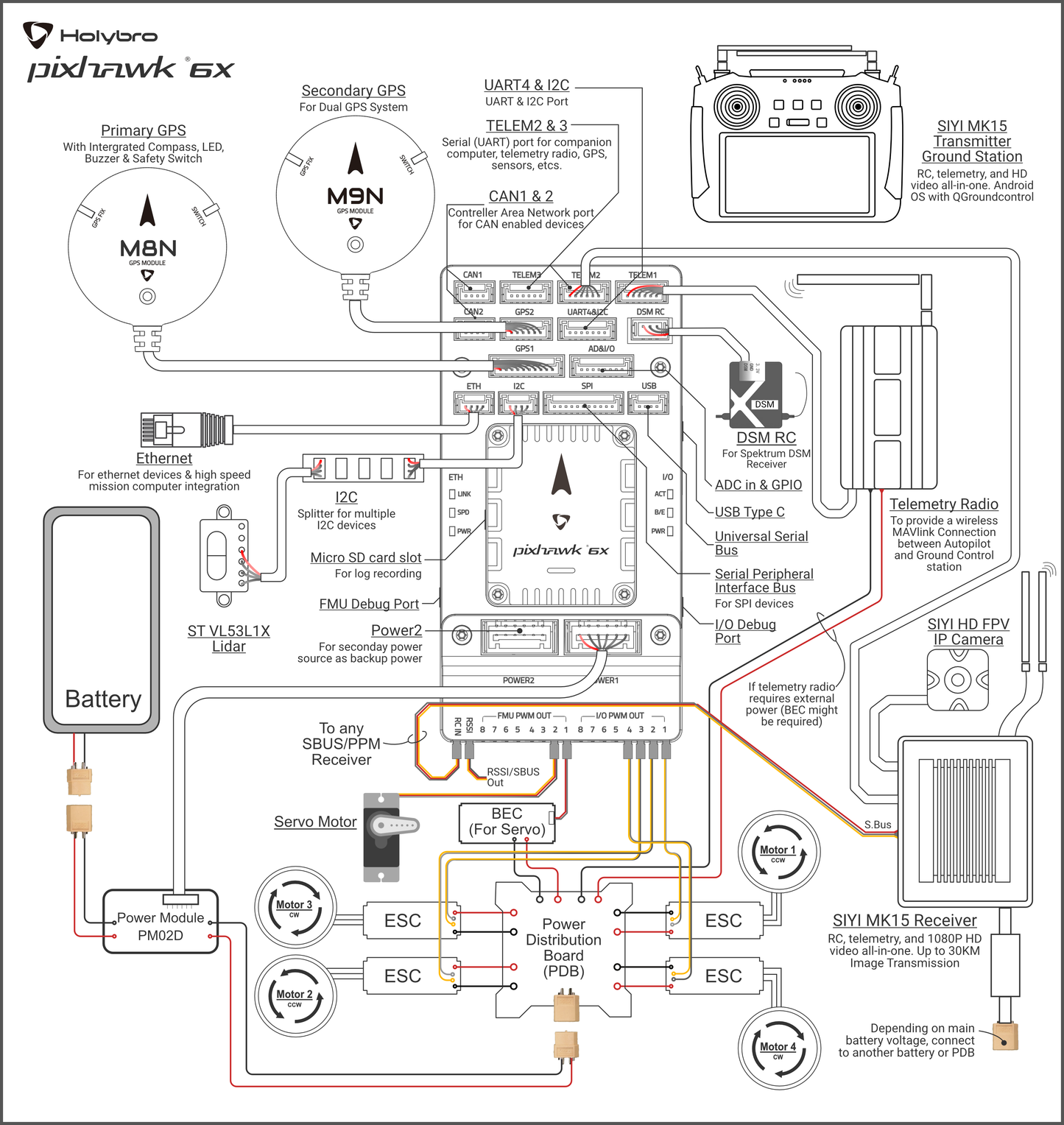
Interfaces
- 16 sorties servo PWM
- Entrée R/C pour Spektrum / DSM
- Entrée R/C dédiée pour les entrées PPM et S.Bus
- Entrée RSSI analogique / PWM dédiée et sortie S.Bus
-
4 ports série polyvalents
- 3 avec contrôle de flux complet
- 1 avec limite de courant de 1,5 A séparée (Telem1)
- 1 avec I2C et ligne GPIO supplémentaire pour lecteur NFC externe
-
2 ports GPS
- 1 port GPS complet plus interrupteur de sécurité
- 1 port GPS basique
- 1 port I2C
-
1 port Ethernet
- Applications sans transformateur
- 100 Mbps
-
1 bus SPI
- 2 lignes de sélection de puce
- 2 lignes de données prêtes
- 1 ligne SPI SYNC
- 1 ligne de réinitialisation SPI
-
2 bus CAN pour périphériques CAN
- Le bus CAN dispose de commandes silencieuses individuelles ou d'un contrôle ESC RX-MUX
-
2 ports d'entrée d'alimentation avec SMBus
- 1 port AD & IO
- 2 entrées analogiques supplémentaires
- 1 entrée PWM/Capture
- 2 lignes de débogage et GPIO dédiées
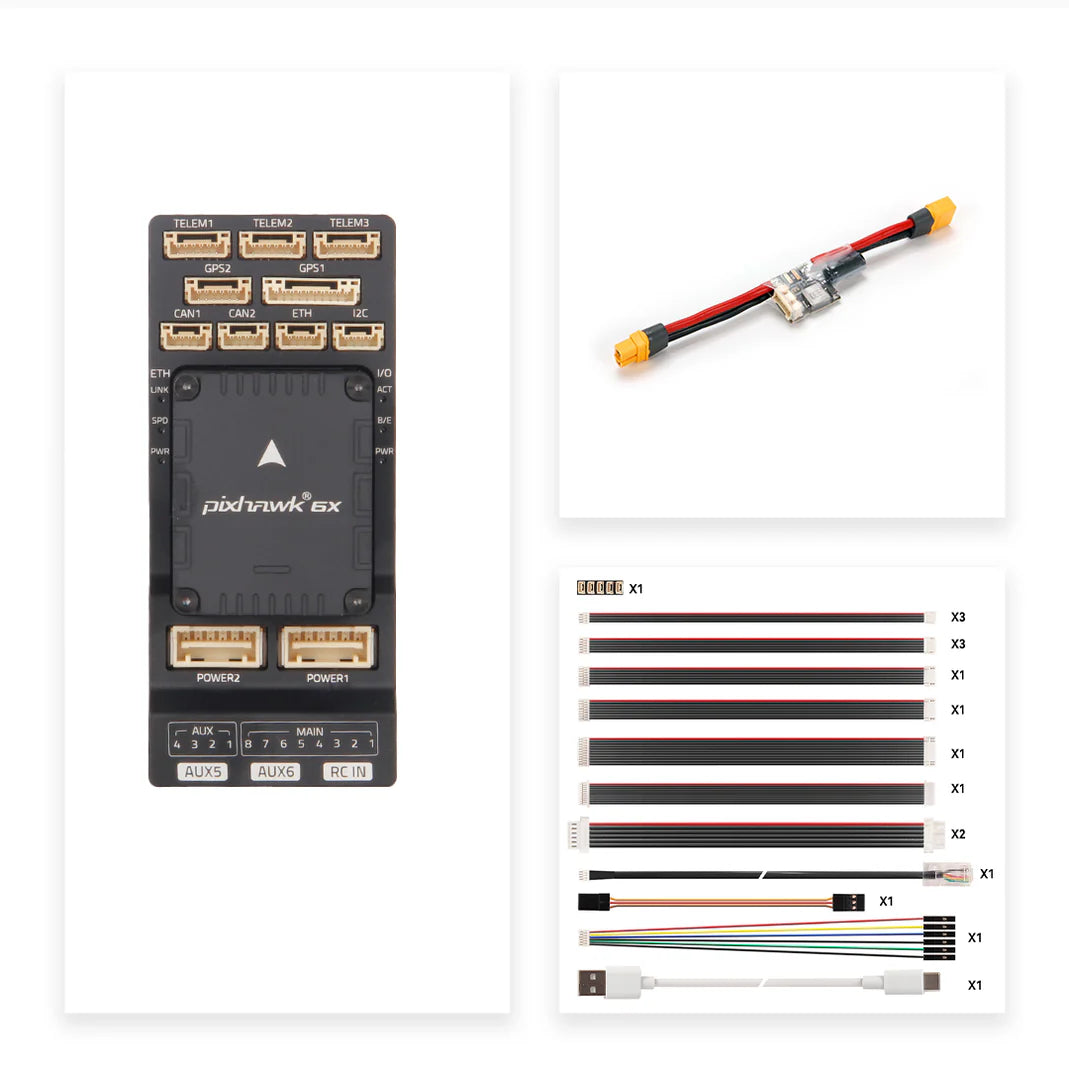
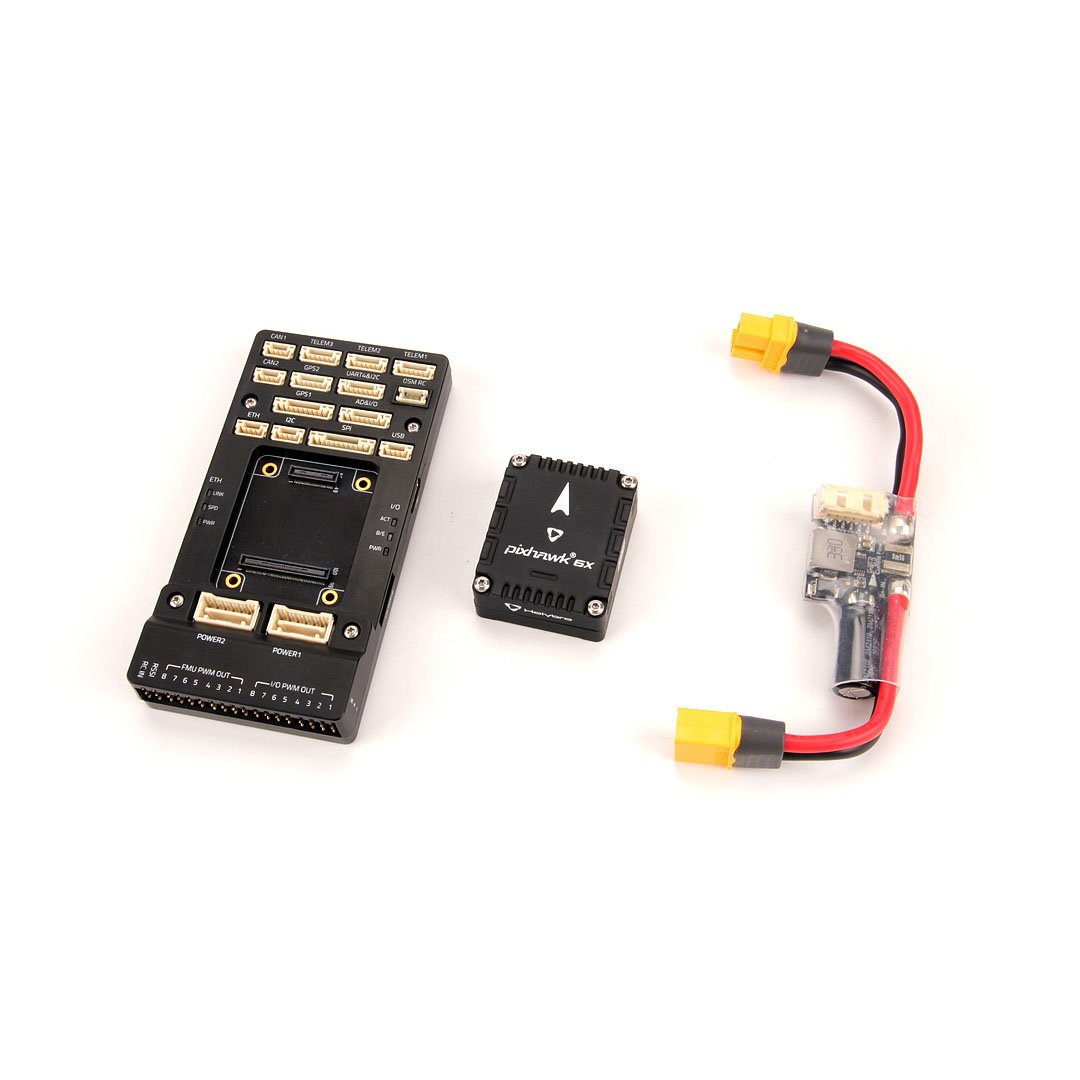
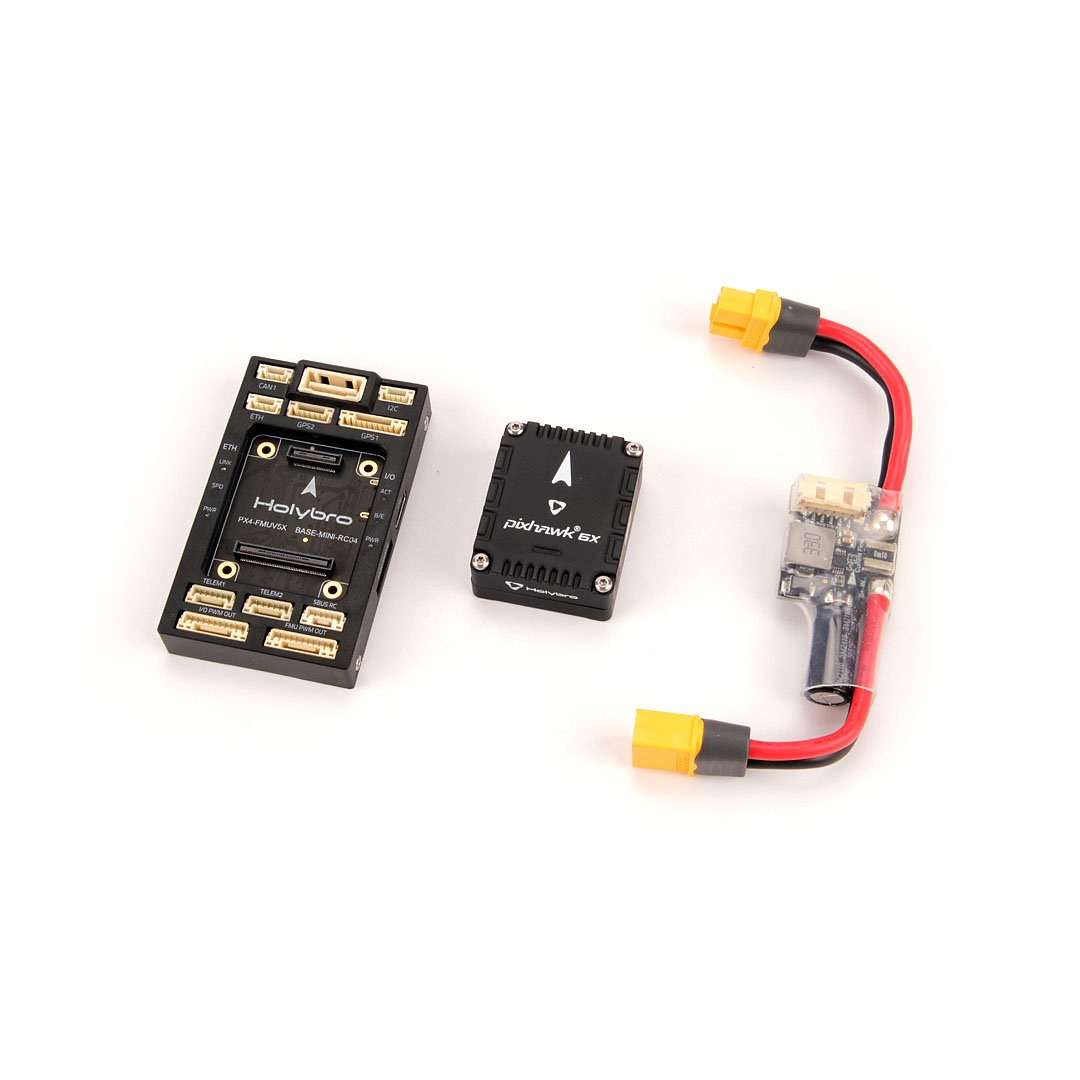
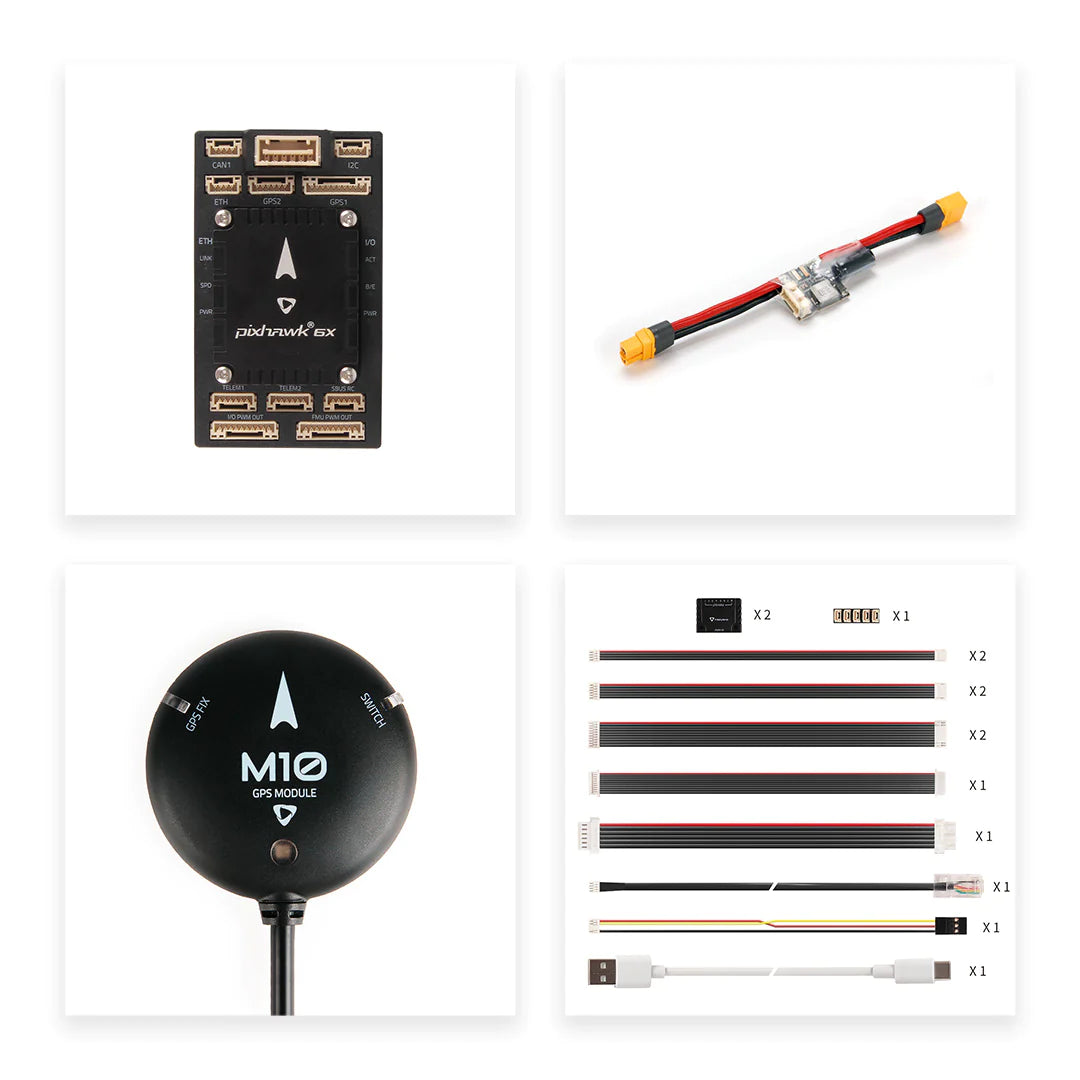
Inclus
Ensemble standard
- Module de contrôleur de vol Pixhawk 6X
- Base standard Pixhawk / Mini-base Pixhawk
- Module d'alimentation PM02D
- Jeu de câbles
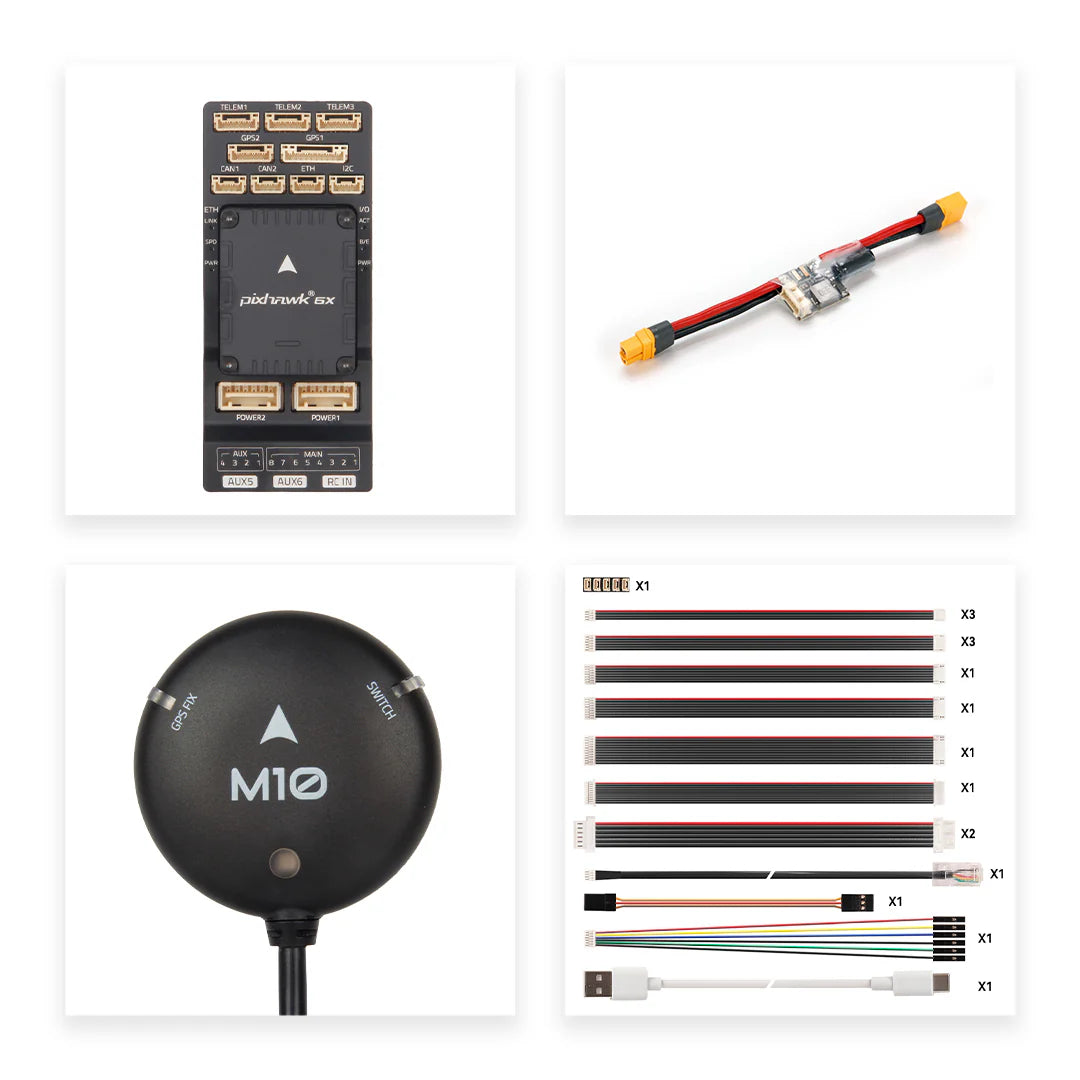
Ensemble standard + GPS M10
- Module de contrôleur de vol Pixhawk 6X
- Base standard Pixhawk / Mini-base Pixhawk
- Module d'alimentation PM02D
- Jeu de câbles
- GPS M10