




Détails du produit
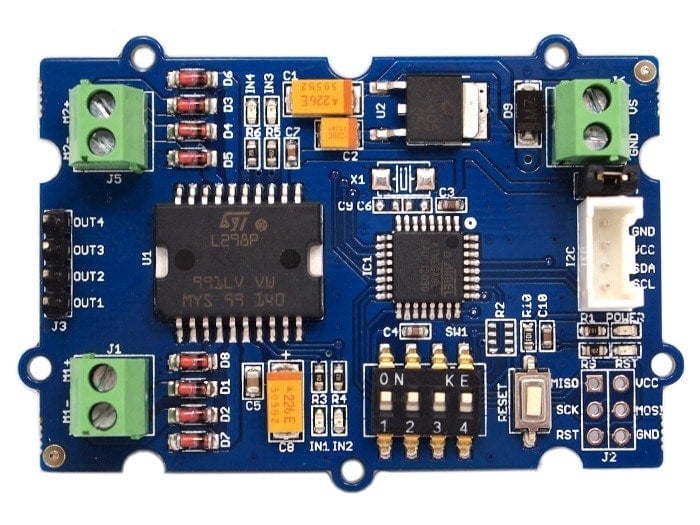
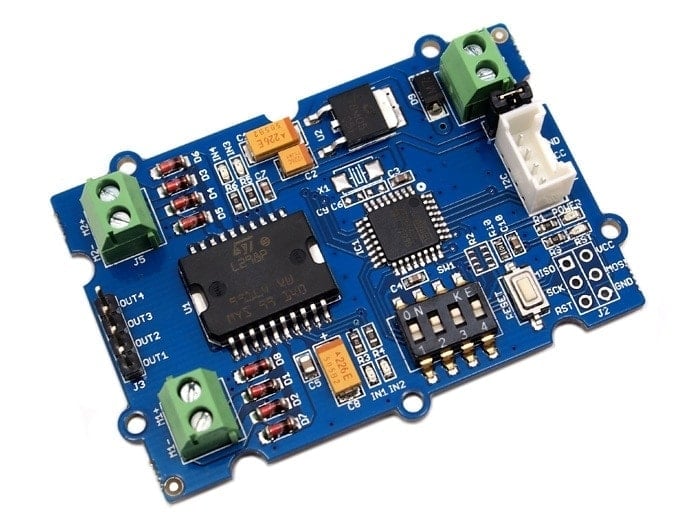
Le Grove - I2C Motor Driver V1.3 (dernière version) peut contrôler directement un moteur pas à pas ou un moteur à courant continu. Son cœur est une puce de pilote en pont en H à double canal (L298N) qui peut gérer un courant allant jusqu'à 2A par canal, contrôlée par un Atmel ATmega8L qui gère la communication I2C avec des plateformes telles qu'Arduino. Les deux moteurs peuvent être entraînés simultanément tout en étant réglés sur une vitesse et une direction différentes. Il peut alimenter deux moteurs à courant continu à balais ou un moteur pas à pas biphasé à 4 fils. Il nécessite une alimentation de 6V à 15V pour alimenter le moteur et dispose d'un régulateur de tension 5V embarqué qui peut alimenter le bus I2C et l'Arduino (sélectionnable par cavalier). Toutes les lignes de commande sont protégées par des diodes contre la CEM arrière.
Spécifications
| Article | Min | Typique | Max | Unité |
|---|---|---|---|---|
| Tension de fonctionnement | 6 | - | 15 | VDC |
| Courant de sortie max par canal | 0.5 | A | ||
| Courant total maximum | 1.0 | A | ||
| Tension d'entrée/sortie sur le bus I2C | 5 | V | ||
| Protocole de communication | I2C | / | ||
[1] REMARQUE : La tension d'entrée sur les borniers est régulée à 5 V et connectée au +5 V I2C via un cavalier (J4). Retirez le cavalier si l'alimentation externe via les borniers et l'alimentation via l'en-tête I2C sont utilisées. Utilisez le cavalier si 5 V doivent être fournis au bus I2C.
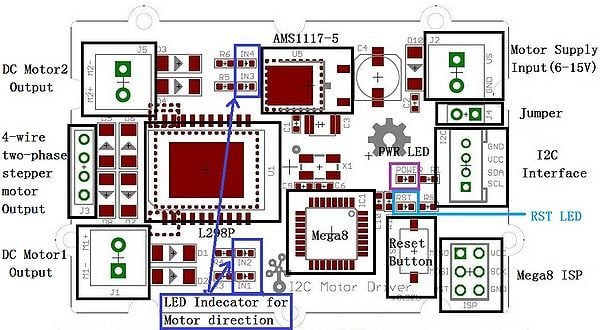
Définitions des broches
| Type de pad | État de la broche | Description |
|---|---|---|
| GND | Entrée | Port de masse |
| VS | Entrée | Alimentation moteur (6-15V), également pour le régulateur 1117-5 |
| SDA | Entrée et Sortie | Données série I2C (logique +5V) |
| SCL | Entrée | Horloge série I2C (logique +5V) |
| VCC | Sortie ou NC (non connecté) | Lorsque le cavalier est en place, VCC comme sortie +5V pour les MCU externes (Xduinos) ; NC lorsque le cavalier est retiré. |
| M1+,M1-,M2+,M2- | Sortie | Sortie moteur CC pertinente par rapport à VS |
Idées d'application
Ce pilote de moteur peut être utilisé pour entraîner tout moteur électronique à balais tant qu'il ne consomme pas plus de 2A à 5V. Deux moteurs peuvent être entraînés simultanément tout en étant réglés sur une vitesse et une direction différentes. La vitesse peut être réglée de manière entièrement proportionnelle et est contrôlée par l'ATmega8 sur la carte à l'aide de la PWM. Elle est définie par des commandes I2C envoyées par exemple par un Arduino. Il est parfait pour des applications telles que les robots, les voitures RC faites maison, les ventilateurs de boîtier, l'éclairage LED haute puissance ou tout autre projet impliquant un contrôle proportionnel de la charge.
Précautions
- La carte sera très chaude si elle fonctionne au-dessus de 1 Ampère. Gardez vos mains éloignées !
- Les différentes versions d'Arduino IDE peuvent avoir des différences. J'utilise arduino-0019 et cela fonctionne bien, mais lorsque j'utilise arduino-0022, je dois ajouter un délai() à la fin de Wire.endTransmission().
Documents
Veuillez visiter notre page wiki pour plus d'informations sur ce produit. Il serait apprécié que vous puissiez nous aider à améliorer les documents, ajouter plus de code de démonstration ou de tutoriels