




Détails du produit
En raison de l'âge de ce produit, nous ne vendons l'APM2.8 qu'en tant que produit hérité, le firmware n'a pas été mis à jour depuis plus de 2 ans et nous n'offrirons aucun support/conseil d'installation. Si l'unité a un problème matériel dès la sortie de l'emballage, nous vous aiderons, mais sinon nous ne pouvons plus offrir de support sur cet article. Nous vous suggérons de plutôt considérer les nouveaux autopilotes basés sur Pixhawk que nous vendons.
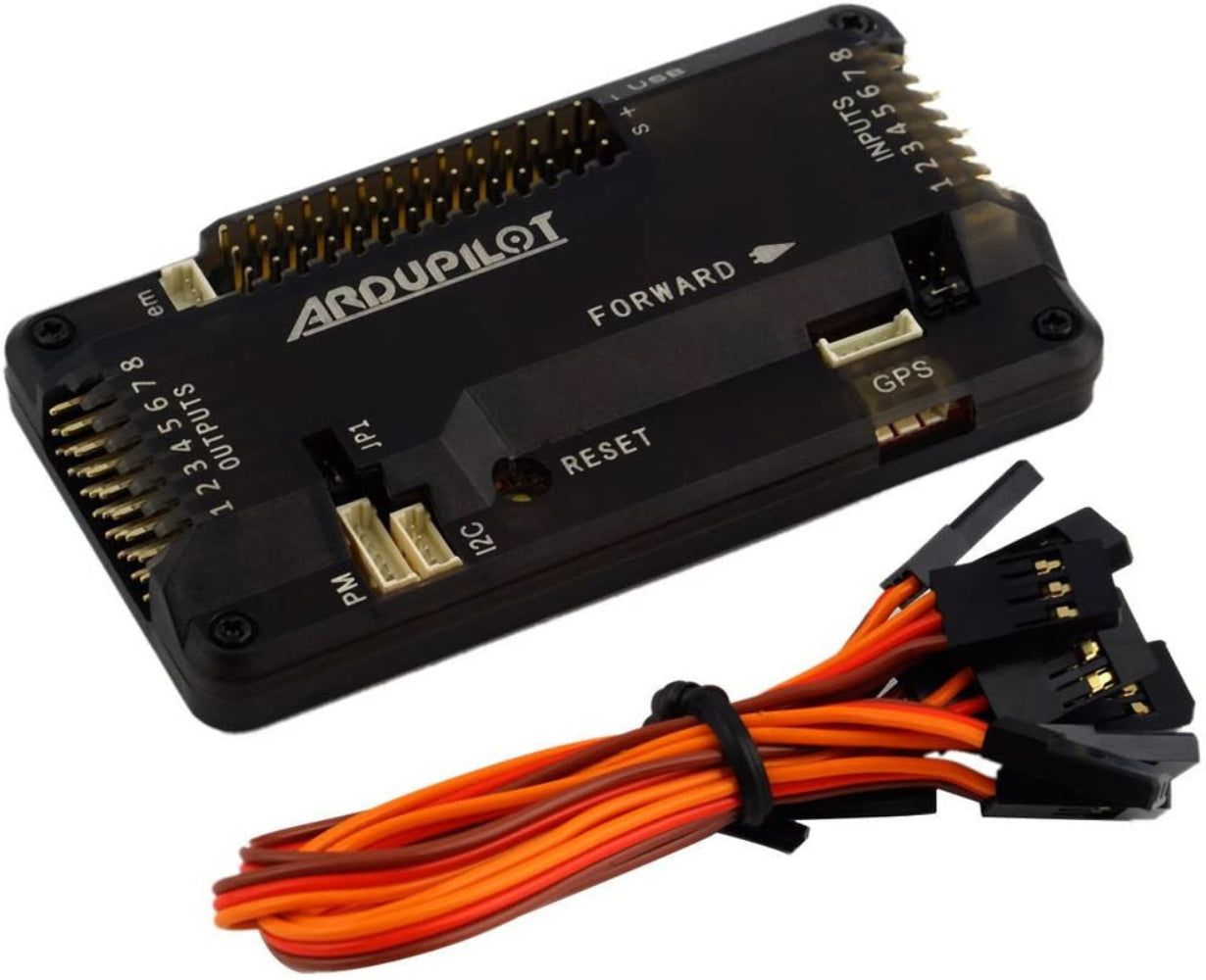
Voici le nouveau contrôleur de vol APM 2.8. Les capteurs sont exactement les mêmes que ceux du contrôleur de vol APM 2.6, mais il offre la possibilité d'utiliser la boussole intégrée ou une boussole externe via un cavalier. Cela rend l'APM 2.8 idéal pour une utilisation avec des multicoptères et des rovers.
L'APM 2.8 est un système d'autopilote open source complet et la technologie la plus vendue qui a remporté le prestigieux concours Outback Challenge UAV. Il permet à l'utilisateur de transformer n'importe quel véhicule à voilure fixe, à voilure tournante ou multirotor (même des voitures et des bateaux) en un véhicule entièrement autonome ; capable d'effectuer des missions GPS programmées avec des waypoints.
Cette révision de la carte dispose d'une boussole embarquée optionnelle, conçue pour les véhicules (en particulier les multicoptères et les rovers) où la boussole doit être placée aussi loin que possible des sources d'alimentation et de moteur pour éviter les interférences magnétiques. (Sur les avions à voilure fixe, il est souvent plus facile de monter l'APM suffisamment loin des moteurs et des ESC pour éviter les interférences magnétiques, ce n'est donc pas aussi critique, mais l'APM 2.8 offre plus de flexibilité dans ce positionnement et est également un bon choix pour eux). Ceci est conçu pour être utilisé avec le GPS uBlox 3DR avec boussole, de sorte que l'unité GPS/boussole puisse être montée plus loin des sources de bruit que l'APM lui-même.
L'APM 2.8 nécessite une unité GPS pour une autonomie totale. Vous pouvez ajouter des extras à votre carte AMP 2.8 via les options ci-dessus.
Utilisation de la boussole intégrée
Pour utiliser la boussole intégrée, connectez simplement le cavalier comme indiqué ci-dessous. Si le cavalier de la boussole est retiré, la carte APM utilisera la boussole externe, ce qui est préférable pour les multirotors avec un module GPS/boussole monté à l'extérieur
 .
.
LOGICIEL DE CONTRÔLE AU SOL PUISSANT
Le logiciel de planification de mission téléchargeable est ce que vous utilisez pour configurer et contrôler votre carte Ardupilot, les fonctionnalités incluent :
- Saisie de waypoints par pointer-cliquer, à l'aide de Google Maps.
- Sélectionnez les commandes de mission dans les menus déroulants
- Téléchargez les fichiers journaux de mission et analysez-les
- Configurez les paramètres APM pour votre cellule
- Interface avec un simulateur de vol PC pour créer un simulateur de drone avec du matériel réel.
- Voir la sortie du terminal série de l'APM
QUE PEUT CONTRÔLER LA CARTE APM ?
La carte ArduPilot Mega peut contrôler des avions, des hélicoptères et des rovers. Tout ce que vous avez à faire est de charger le logiciel approprié sur la carte en quelques clics
CARACTÉRISTIQUES :
- Compatible Arduino !
- Comprend un gyroscope 3 axes, un accéléromètre, ainsi qu'un baromètre haute performance
- Puce Dataflash embarquée de 4 mégaoctets pour l'enregistrement automatique des données
- GPS optionnel externe, module uBlox LEA-6H avec boussole.
- L'un des premiers systèmes d'autopilote open source à utiliser l'accéléromètre/gyroscope 6 DoF MPU-6000 d'Invensense.
- Capteur de pression barométrique mis à niveau vers le MS5607, de Measurement Specialties.
- Puces ATMEGA2560 et ATMEGA32U-2 d'Atmel pour le traitement et les fonctions USB respectivement.
- Poids : 30g