




Détails du produit
Le contrôleur de vol Airbot F7 utilise l'ICM20602 via SPI pour des performances de vol optimales. Une puce OSD AB7456 est également embarquée pour une prise en charge OSD BetaFlight entièrement intégrée. Les autres caractéristiques de l'Airbot F7 incluent : une entrée LiPo directe 3-6S, 6x UART matériels, 1x I2C externe, 1x SPI externe, un contrôle de caméra, une mémoire flash intégrée, un micro connecteur RX, un connecteur ESC 4-en-1 et un profil bas pour des installations faciles.
Caractéristiques principales
-
MCU STM32 F722, exécute le firmware Betaflight
-
Gyroscope ICM via bus SPI
-
Trous de montage 30,5*30,5 mm
-
Supporte le branchement direct Lipo (3-6S)
-
Supporte la sortie BEC 5V 2A (Buck)
-
Le STM32 contrôle la puce OSD via SPI en mode DMA (OSD Betaflight)
-
Plus de UARTs (6xUARTs)
-
Supporte la fonction de contrôle de la caméra
-
Supporte le boîtier gyroscopique externe
-
Flash embarqué de 128 Mbits (16 Mo) pour la boîte noire
Spécifications
- Nom de marque : Airbot
- Nom de l'article : Contrôleur de vol F7 AIO OSD BEC
- MCU : STM32F722
- Tension d'entrée : Lipo 3-6S
- OSD Betaflight
- BEC : 5V @ 2A
- Taille : 36x36mm
- Trou de montage : 30,5x30,5mm
Contenu du kit
- 1x Contrôleur de vol Airbot F7
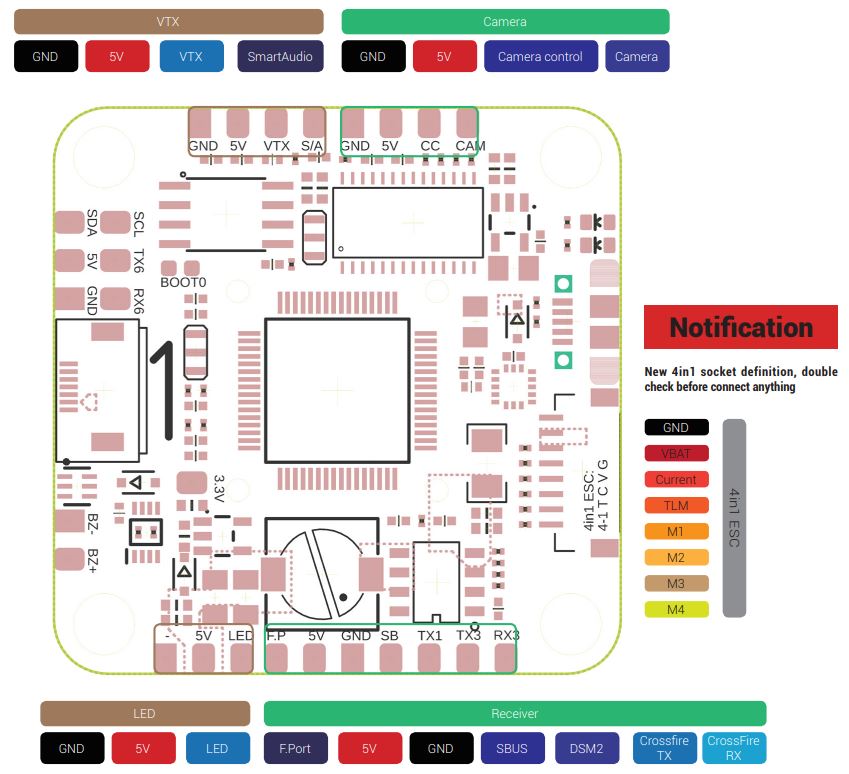
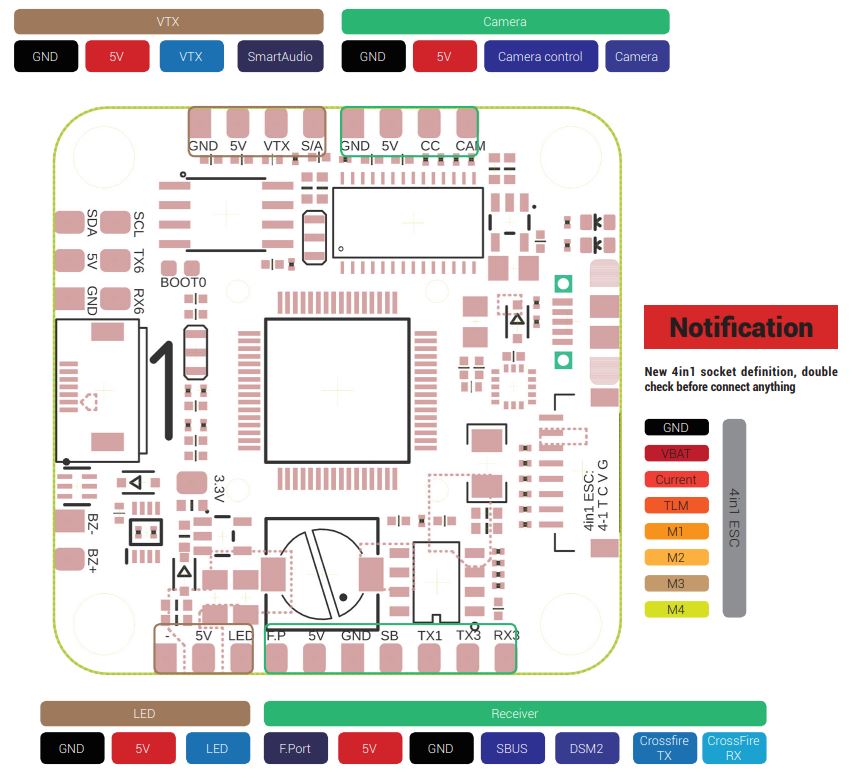
Broches de l'Airbot F7

Tableau des ressources de l'Airbot F7
| Fonction |
Tampon de soudure
Sérigraphie |
Ressources | Broche MCU | Remarques |
| SBUS | SB | RX 1 | PA10 | |
| DSM2 | TX1 | TX 1 | PA9 | CLI : serialrx_halfduplex réglé sur ON |
| VTX Smart Audio | S/A | TX 5 | PC12 | |
| Smartport | S.P | TX 4 | PA0 | |
| Télémétrie ESC | TLM | TX 2 | PA2 | CLI : set esc_sensor_halfduplex = ON |
| Contrôle de la caméra | CC | PA8 | ||
| SDA | SDA | I2C1_SDA | PB9 | Pull-up externe nécessaire |
| SCL | SCL | I2C1_SCL | PB8 | |
| GPS | RX6/TX6 | UART 6 | PC6/7 | |
| LED WS2812B | LED | PA15 | ||
| Buzzer | Bz-/Bz+ | PB0 |
Pilotes Zadig
Si vous rencontrez des problèmes de connexion à la carte ou de téléchargement d'un nouveau micrologiciel, la meilleure solution consiste à utiliser l'outil de pilote zadig.
- Appuyez sur le bouton BOOT du contrôleur de vol.
- Branchez le câble USB (la LED rouge ne doit pas être aussi lumineuse que d'habitude).
- Lancez Zadig et cliquez sur "Options" puis sur "List All Devices".
- Dans la liste, choisissez "STM32 BOOTLOADER".
- Sous "Driver", choisissez "WinUSB" à droite et cliquez sur "Reinstall Driver".
Pour plus d'informations, consultez notre tutoriel sur l'outil de pilote zadig