































Détails du produit
Remarque : Comme tous nos produits Airbot, il s'agit de la carte Airbot originale et authentique, et non d'un clone.
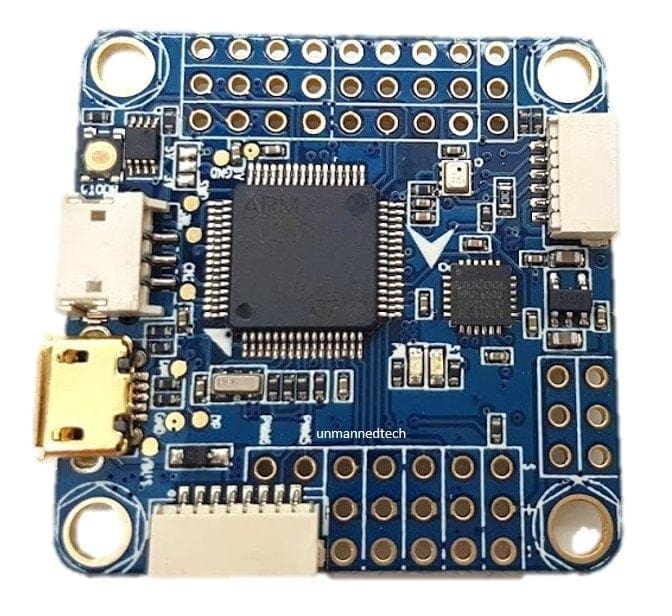
La série de contrôleurs de vol Omnibus est reconnue comme la meilleure carte de contrôle de vol intégrée tout-en-un, utilisant la meilleure sélection de capteurs et de pièces à un prix avantageux et dans un petit format. La dernière addition à la série utilise désormais le MCU STM32 F405 performant. L'Omnibus F4 utilise l'IMU MPU6000/ICM-20608 via SPI pour des mises à jour gyroscopiques ultra-rapides (jusqu'à 32 Khz) afin de suivre le MCU F4 rapide, vous permettant d'exécuter votre boucle de contrôle Betaflight/iNav à une vitesse folle. Cela vous donne un avantage supplémentaire lors de la course avec votre quadcopter FPV.
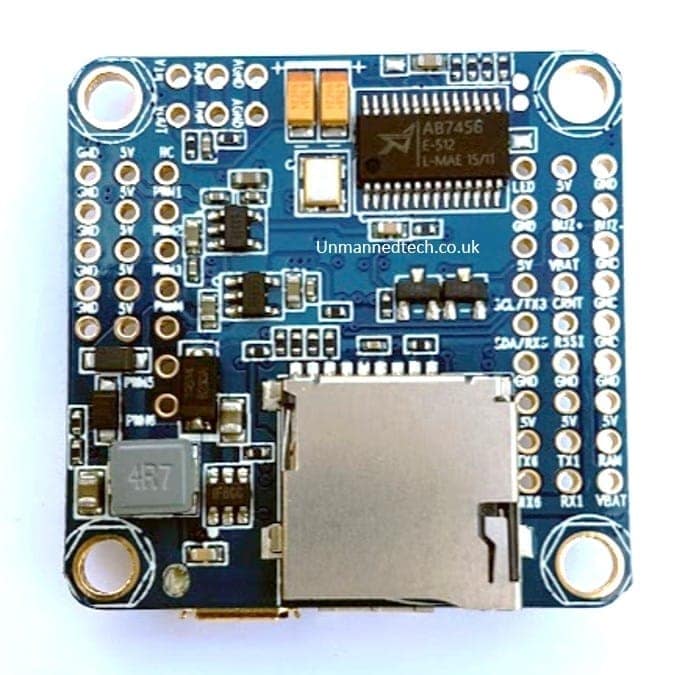
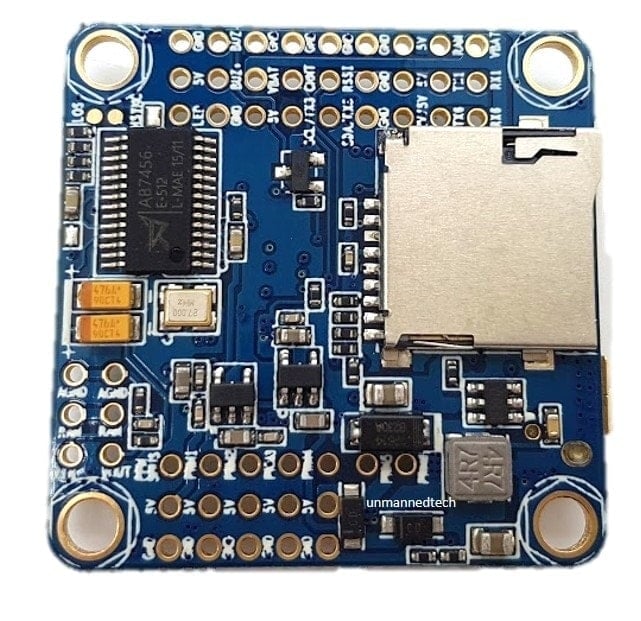
La puce OSD AB7456 (une version améliorée du MAX7456) permet une configuration et des mises à jour directes depuis Betaflight. Cette puce OSD consomme beaucoup moins d'énergie que l'ancienne puce OSD MAX7456, mais le principal avantage est qu'elle peut être configurée directement depuis Betaflight, sans avoir besoin d'un FTDI externe ou de commutateurs. De plus, l'Omnibus F4 comprend un régulateur de tension STM L78 haute performance de 5V, 1,5A qui aide à filtrer l'alimentation et ajoute une protection de tension à la carte.
Vous pouvez consulter le manuel de l'Omnibus F4 V6 sur dronetrest.com
Versions Omnibus
-
L'Omnibus V6 présente pas mal de changements :
- Nouvelle cible de firmware (OMNIBUSF4FW) - après le flash, allez dans la CLI et tapez set gyro_to_use = second, puis enregistrez pour que l'IMU fonctionne.
- 5 ports UART
- BEC 5V 1A et 8V pour la caméra FPV
- Sélecteur de cavalier de source de courant (voir le manuel pour plus d'informations)
- L'Omnibus V5 comprend un cavalier de sélection de source de courant (voir le schéma de câblage ci-dessous pour plus de détails), et l'Omnibus F4 V5 utilise également un nouveau connecteur Sh 1.0 à 8 broches pour faciliter la connexion d'un ESC 4 en 1. Il est compatible avec des batteries jusqu'à 6S.
- La principale caractéristique de l'Omnibus V4 est que le cavalier de soudure pour sélectionner entre PPM/SBUS n'est plus nécessaire. La carte présente également quelques révisions matérielles mineures pour augmenter encore plus la robustesse de la carte.
- La V3 corrige certains des problèmes de LDO de la V2, vous pouvez donc maintenant alimenter cette carte directement depuis votre batterie (jusqu'à 4S Lipo)
Caractéristiques principales
- Condensateurs au tantale ajoutés pour une lecture du gyroscope sans bruit
- Pads de soudure ajoutés pour SmartAudio et le contrôle de la caméra (à côté des pads vidéo)
- Ajout d'un BEC 8V et d'un filtre LC pour l'alimentation de la caméra et du VTX
- Cette carte dispose désormais de 5 ports UART
- Nouvelle disposition
Spécifications
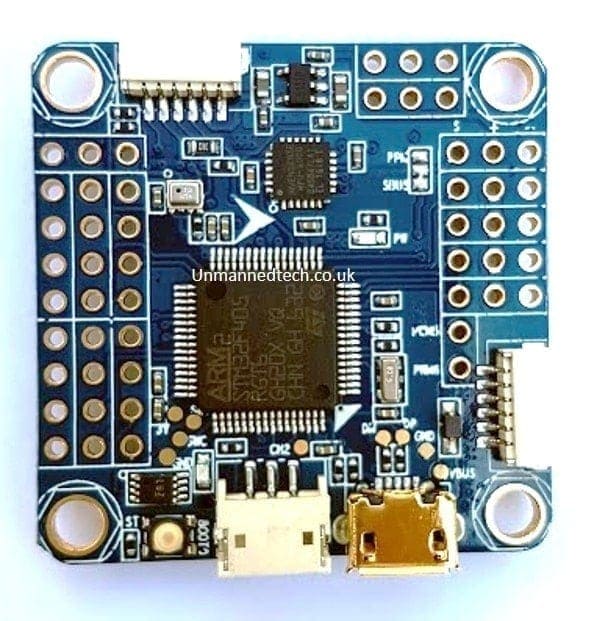
- MCU STM32 F405
- Entrée SBUS (pas de prise en charge d'entrée PPM)
- 6 sorties PWM
- Seulement 36x36mm, trous de montage 30.5x30.5mm
- Baromètre BMP 280
- Capteur SPI MPU6000/ICM-20608
- Flash 128 Mbits
- Alimentation directe depuis une batterie Lipo 2-6S (v5 uniquement)
Contenu du kit
- 1x Contrôleur de vol Omnibus F4
Nous n'incluons pas de broches avec cette carte, mais nous les vendons séparément sur notre site web.
Pilotes Zadig
Si vous rencontrez des problèmes pour vous connecter à la carte ou pour télécharger un nouveau firmware, la meilleure solution consiste à utiliser l'outil de pilote Zadig.
- Appuyez sur le bouton BOOT du contrôleur de vol.
- Branchez le câble USB (la LED rouge ne doit pas être aussi lumineuse que d'habitude).
- Lancez Zadig et cliquez sur "Options", puis sur "List All Devices".
- Dans la liste, choisissez "STM32 BOOTLOADER".
- Sous "Driver", choisissez "WinUSB" à droite et cliquez sur "Reinstall Driver".
Pour plus d'informations, consultez notre tutoriel sur l'outil de pilote Zadig
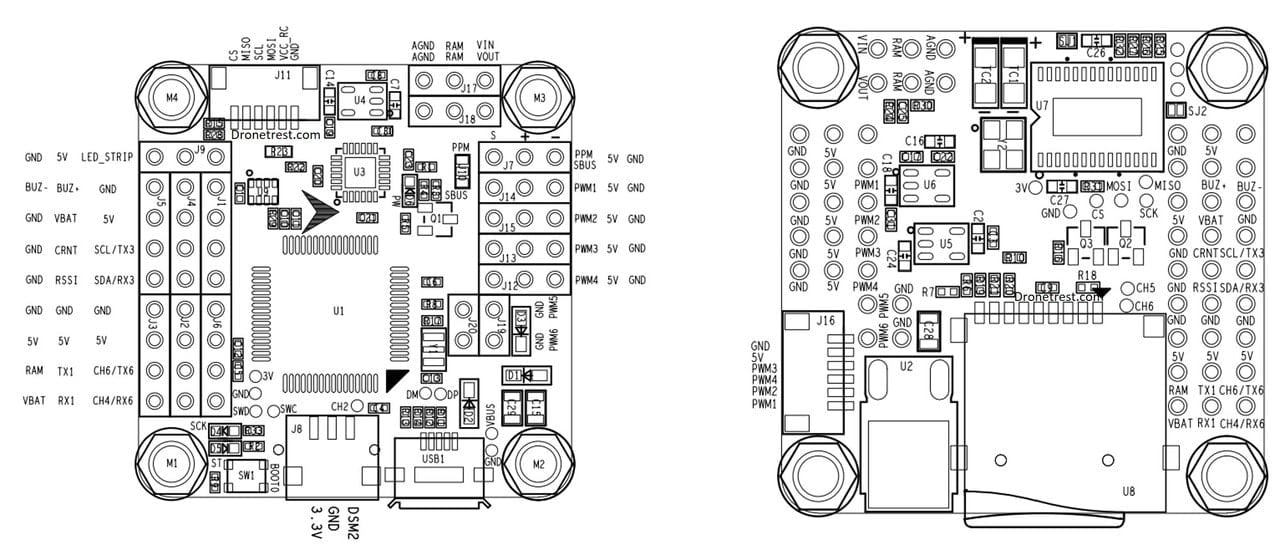
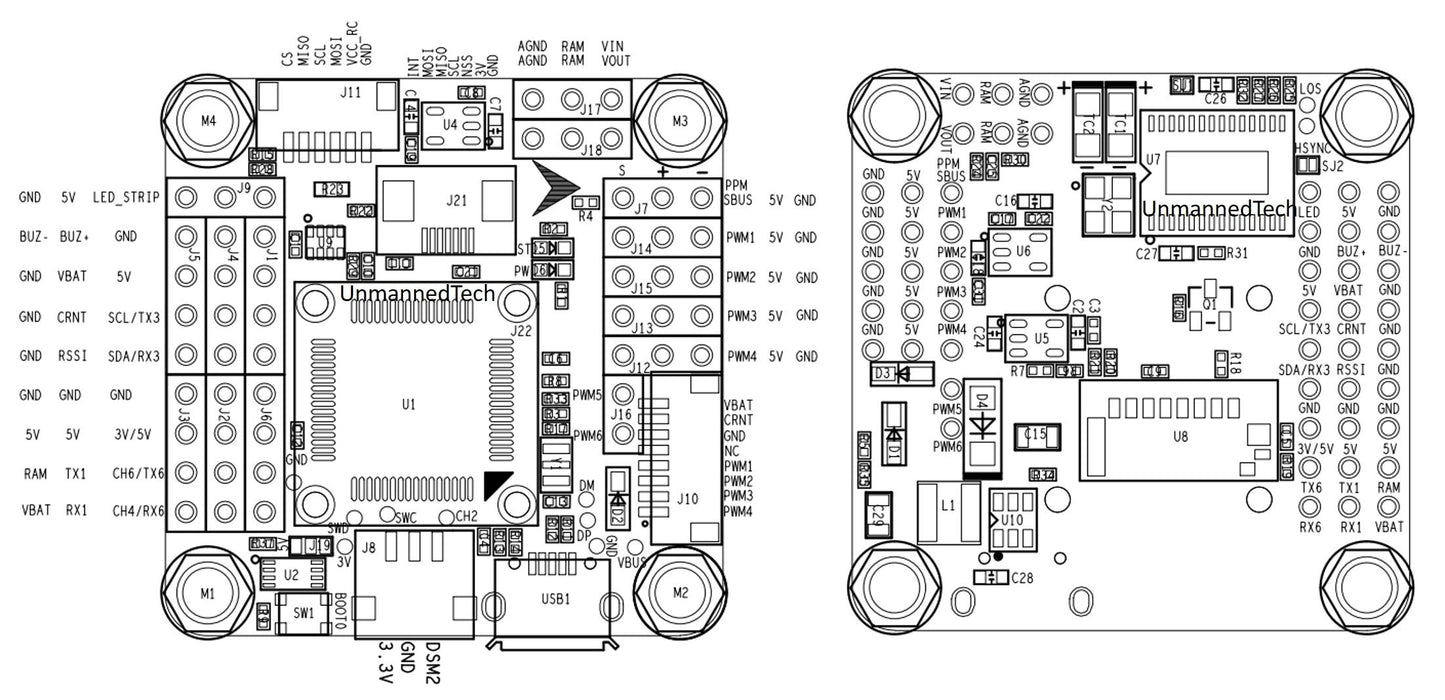
Schéma de câblage de l'Omnibus F4 V6



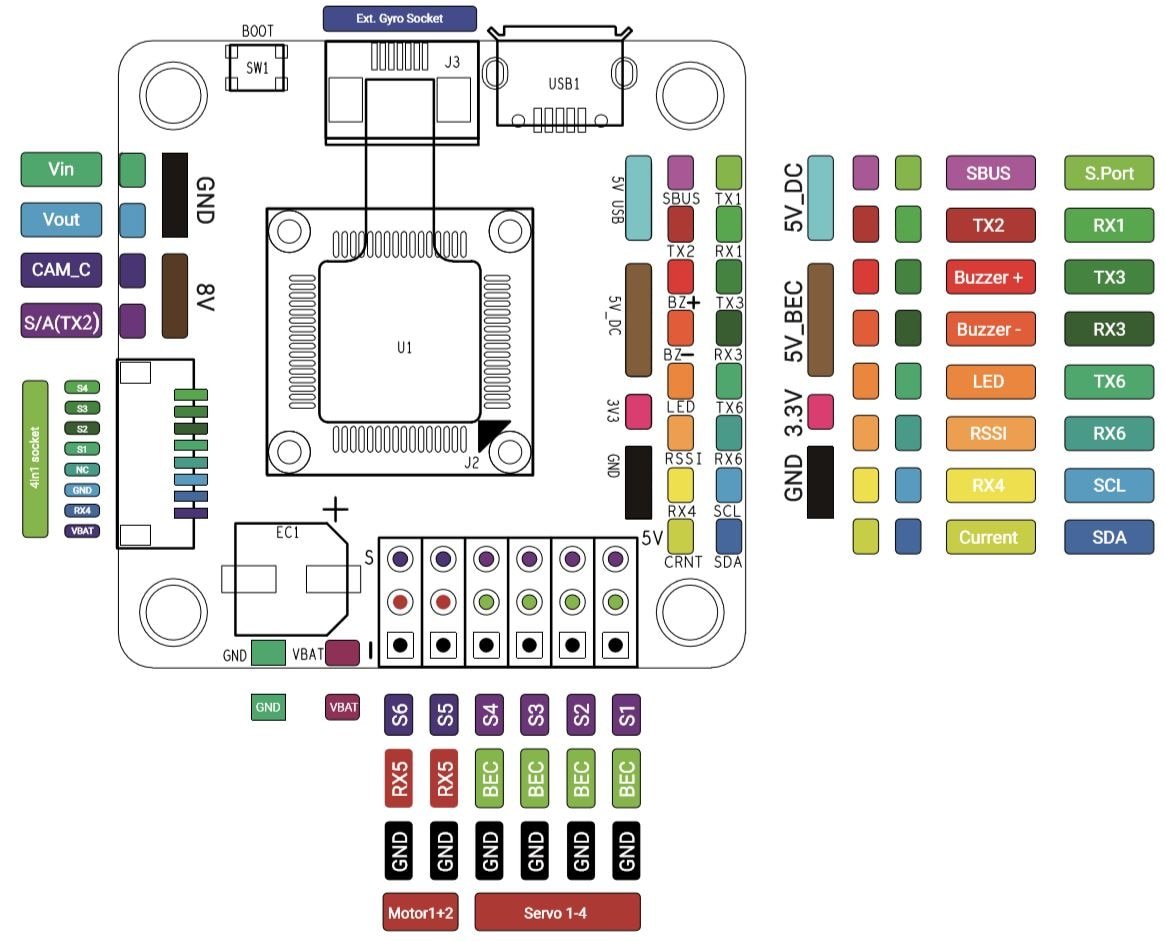
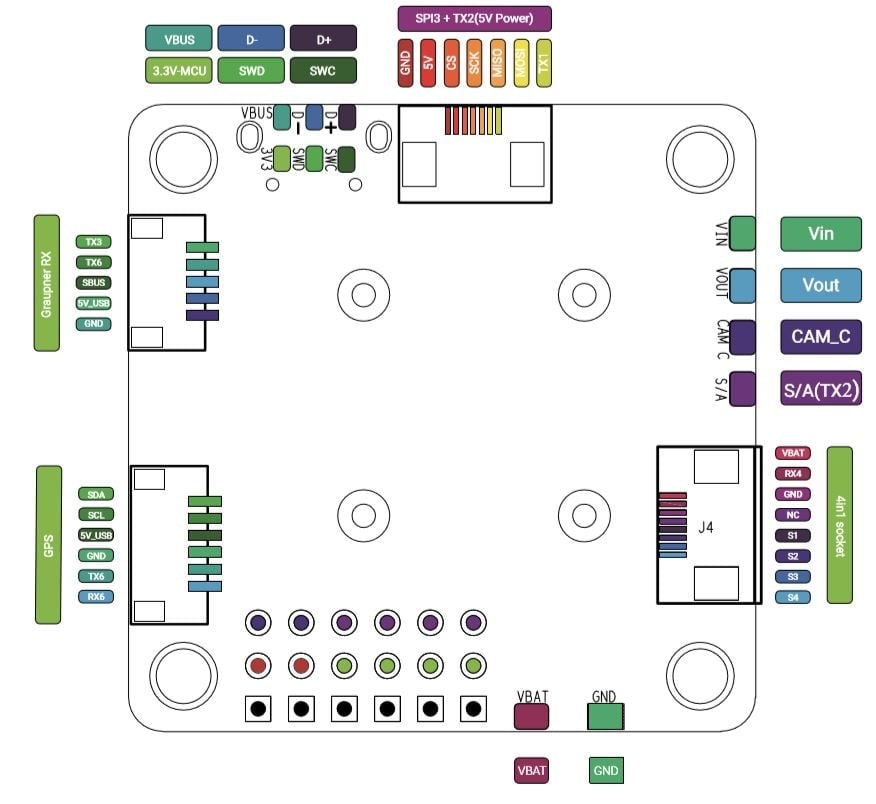
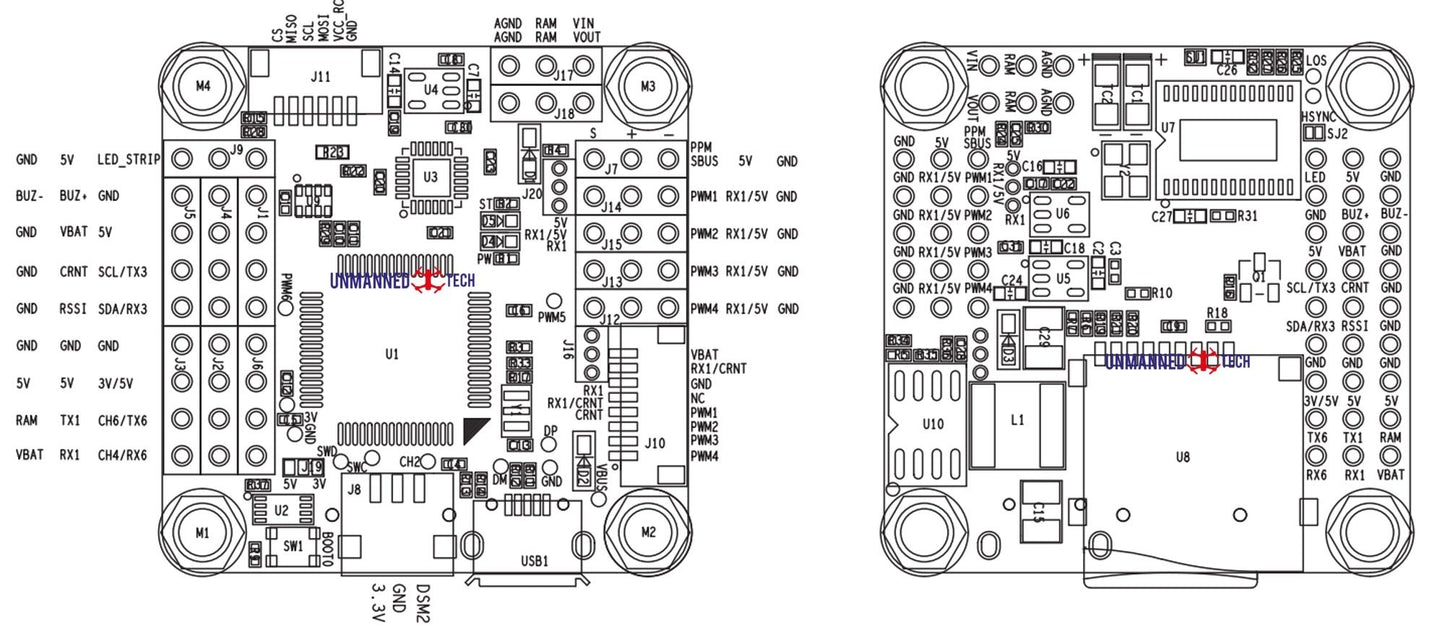
Schéma de câblage de l'Omnibus F4 V5
L'Omnibus V5 inclut un cavalier de sélection de source de courant (voir le schéma de câblage ci-dessous pour plus de détails), et l'Omnibus F4 V5 utilise également une nouvelle prise Sh 1.0 à 8 broches pour faciliter la connexion d'un ESC 4 en 1.

Schéma de câblage de l'Omnibus F4 V4
Ce schéma de câblage v4 est destiné aux personnes qui utilisent encore l'ancienne version. La caractéristique notable de la carte V4 est que le cavalier de sélection SBUS/PPM a été supprimé, vous pouvez maintenant simplement connecter votre récepteur à J7 et sélectionner le type dans Betaflight.

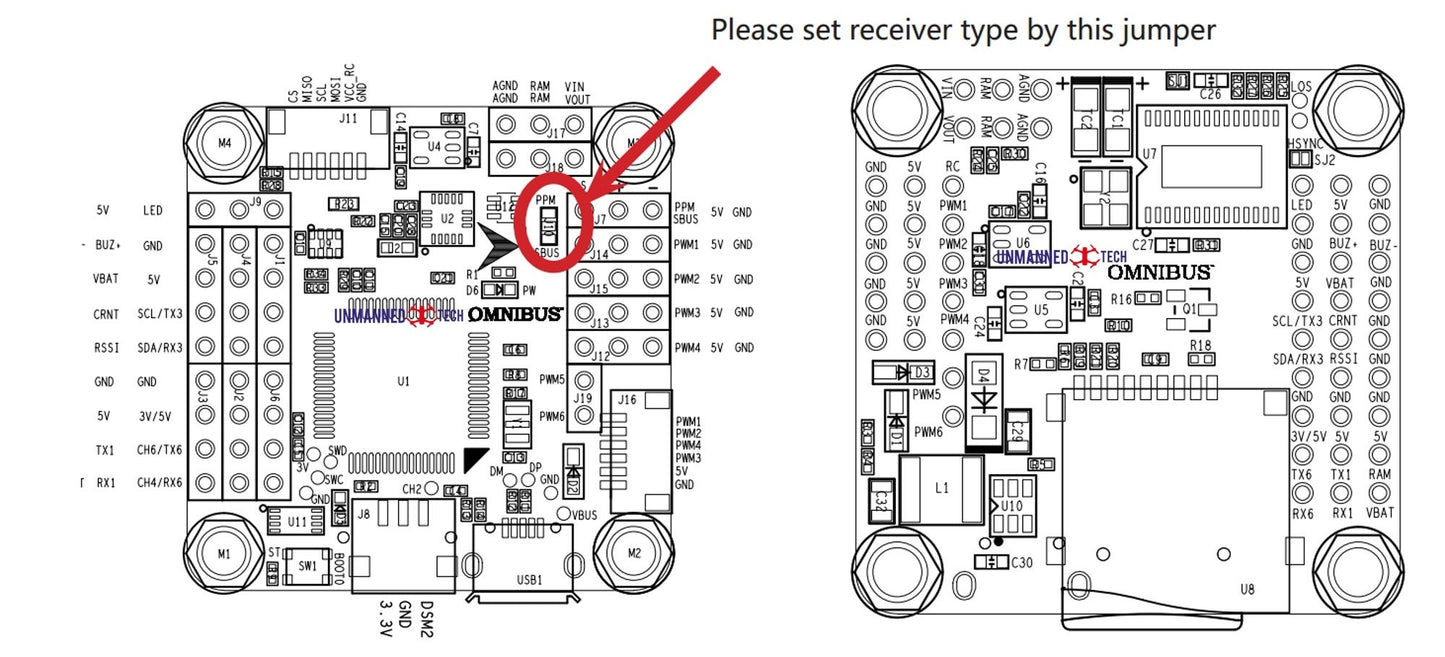
Schéma de câblage de l'Omnibus F4 V3
Le brochage a été conservé ici pour les clients précédents utilisant encore l'Omnibus V3.

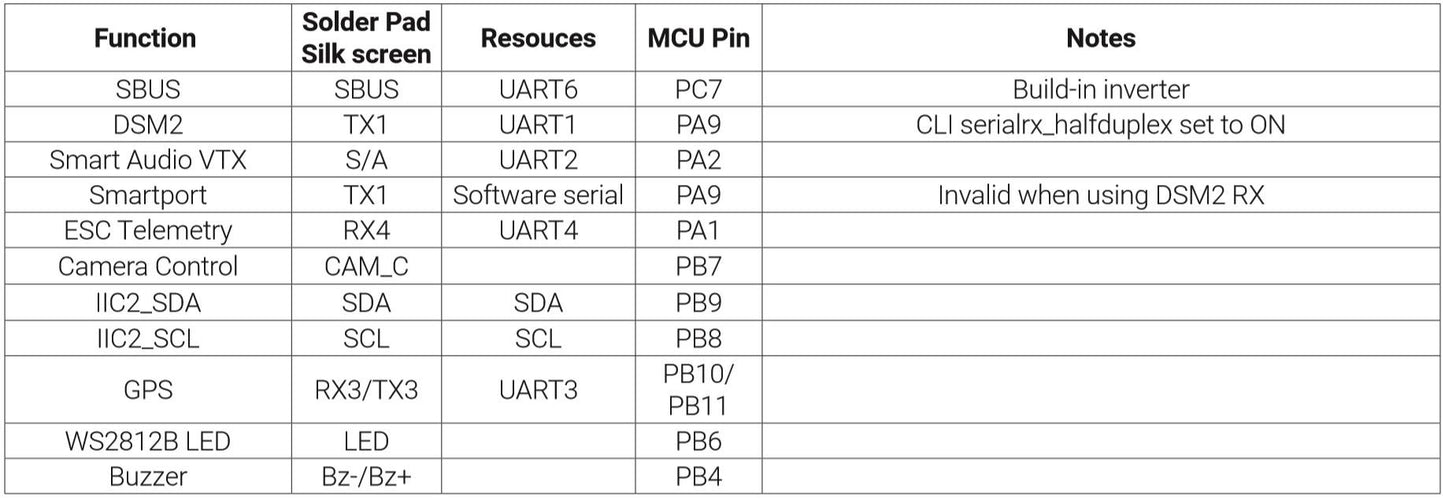
Utilisation de SBUS/PPM/DSM
Il existe un bug connu avec Betaflight qui peut parfois vous empêcher de basculer entre SBUS et PPM. Vous devez d'abord sélectionner le RX série et le sbus dans l'onglet de configuration, enregistrer. Ensuite, allez activer le RX série sur le port UART 6 dans l'onglet des ports et enregistrer. Ensuite, allez et venez entre les deux pour vous assurer que les paramètres ont été correctement enregistrés car parfois cela ne se fait pas correctement.
SBUS inversé et non inversé
- Connecteur SBUS/PPM (J7) (uart6) Il est destiné aux récepteurs à signal inversé ; il possède un inverseur fixe qui ne peut pas être désactivé (par la commande cli sbus_inverter=on/off)
- RX1 (sur J2) (uart1), Ces derniers sont pour les récepteurs à signal non inversé.
Spektrum DSM
- Connecteur DSM (sur J8). Il est destiné aux récepteurs à signal non inversé et équivaut à RX1.
Problèmes d'armement :
- Si vous êtes certain que votre carte est correctement configurée mais qu'elle refuse de s'armer, essayez d'augmenter la limite de bruit du gyroscope dans la CLI en utilisant cette ligne : "set gyro_calib_noise_limit = 120"